 EK
EKIn order to optimize the design of the robot and make better simulations, we need to find the maximum and minimums of the mass that is distributed to each wheel.
For example, if the robot is carrying a payload in the front, there will be more mass distributed to the front wheels.
We created a physics model to calculate the max & min masses, as well as 3 additional scenarios. Spreadsheet for the calculations is available here.
Diagram and Parameters
Here is a diagram showing the reference point, in the middle of the robot, and the distance to the actual center of mass.
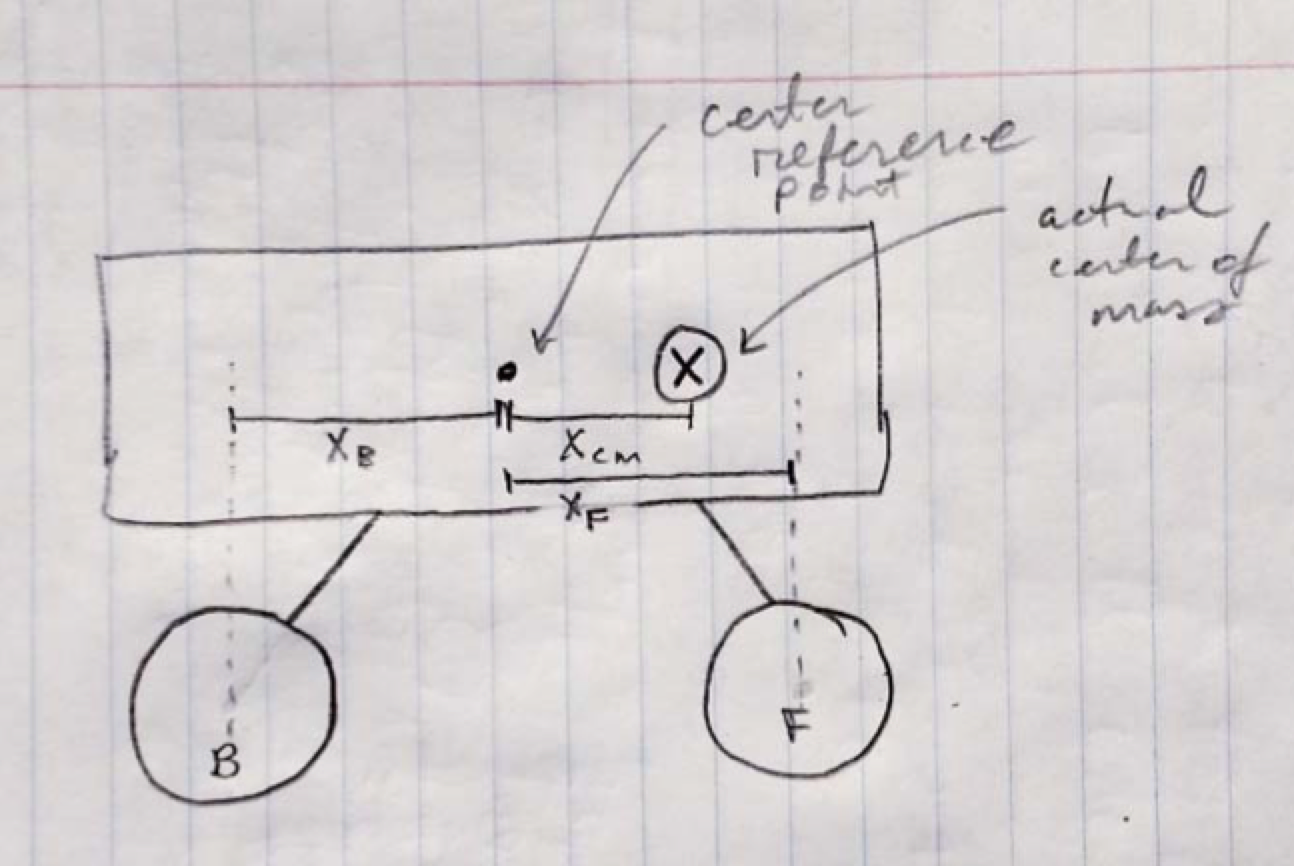
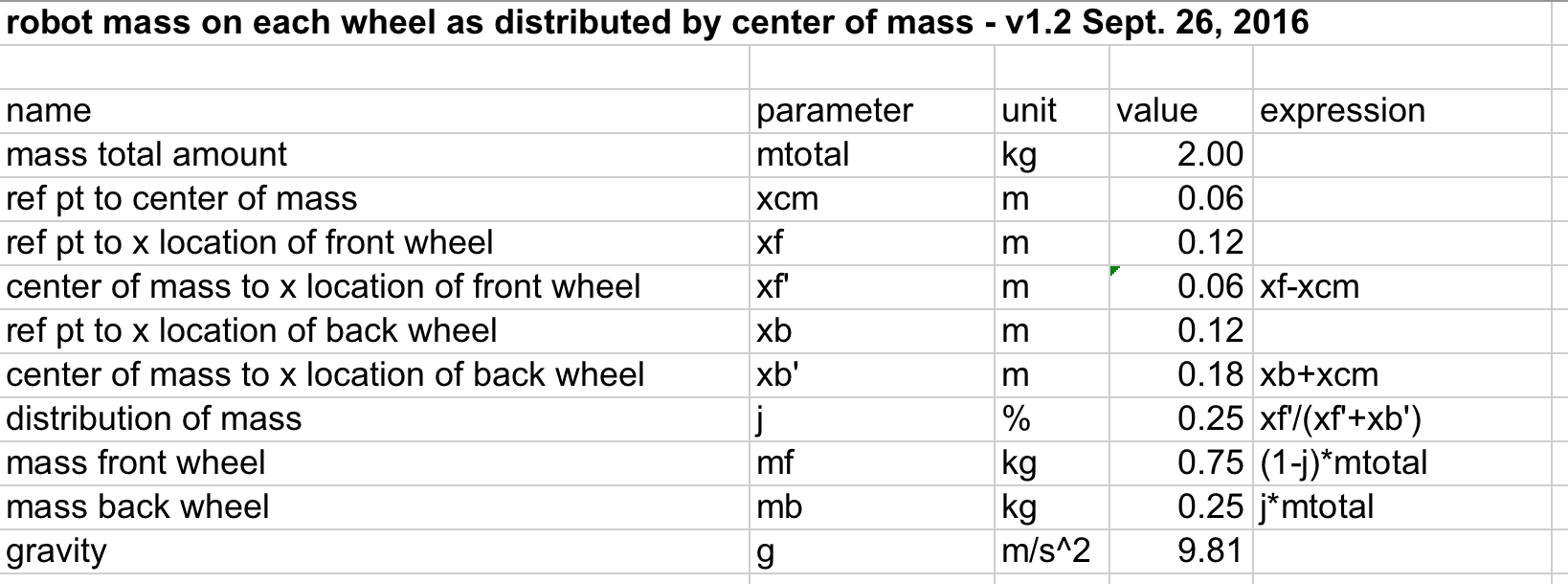
The parameters involved are listed below. The ones that we focus on varying are:
1) Total mass of the robot, mtotal
2) Reference point distance to the center of mass, xcm
We calculate the distribution of mass, j, then distribute half of the total mass to the front and back according to j.
Results - Min & Max
In this graph the mass on wheel vs the center of mass offset for the front wheel and back wheel
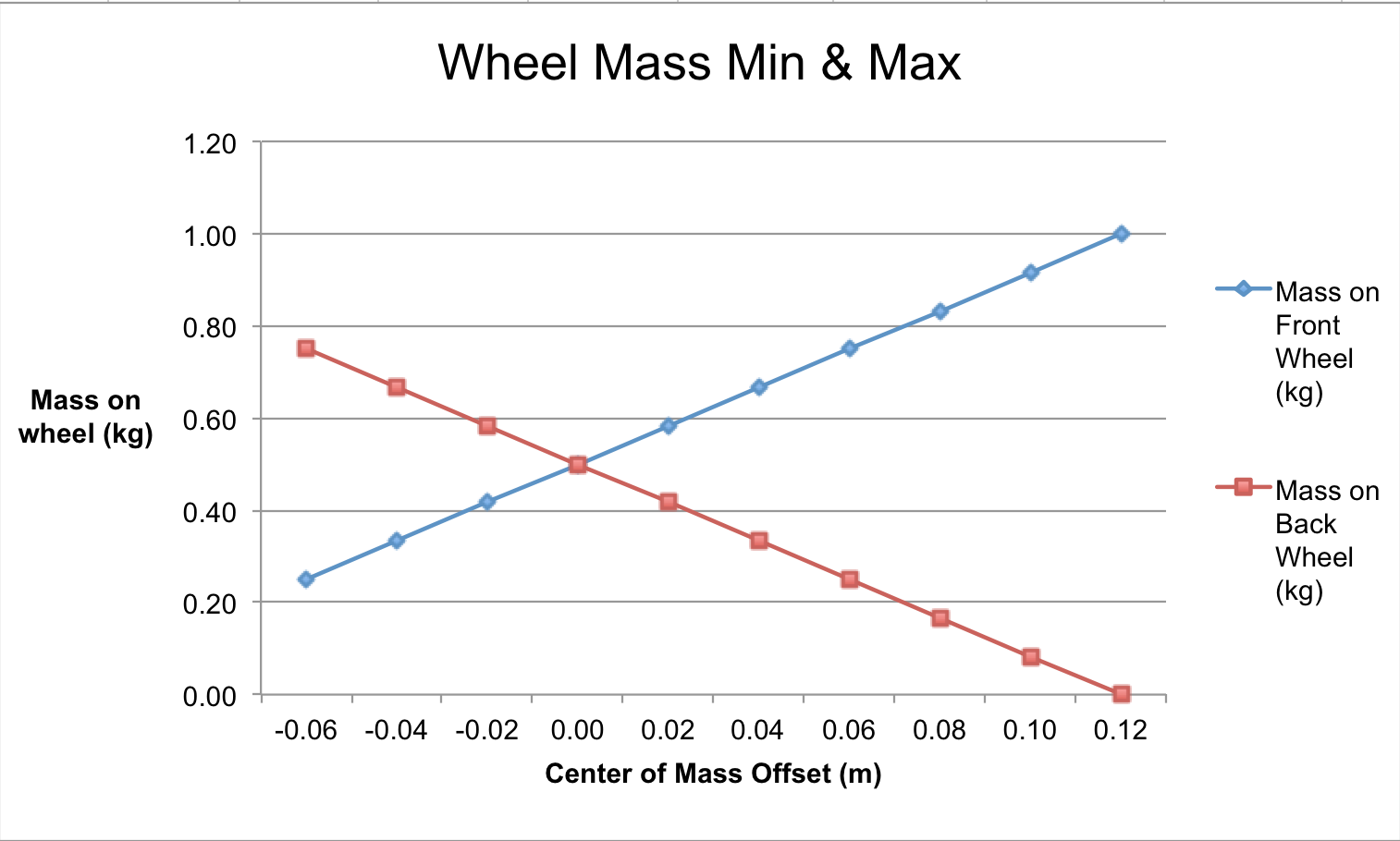
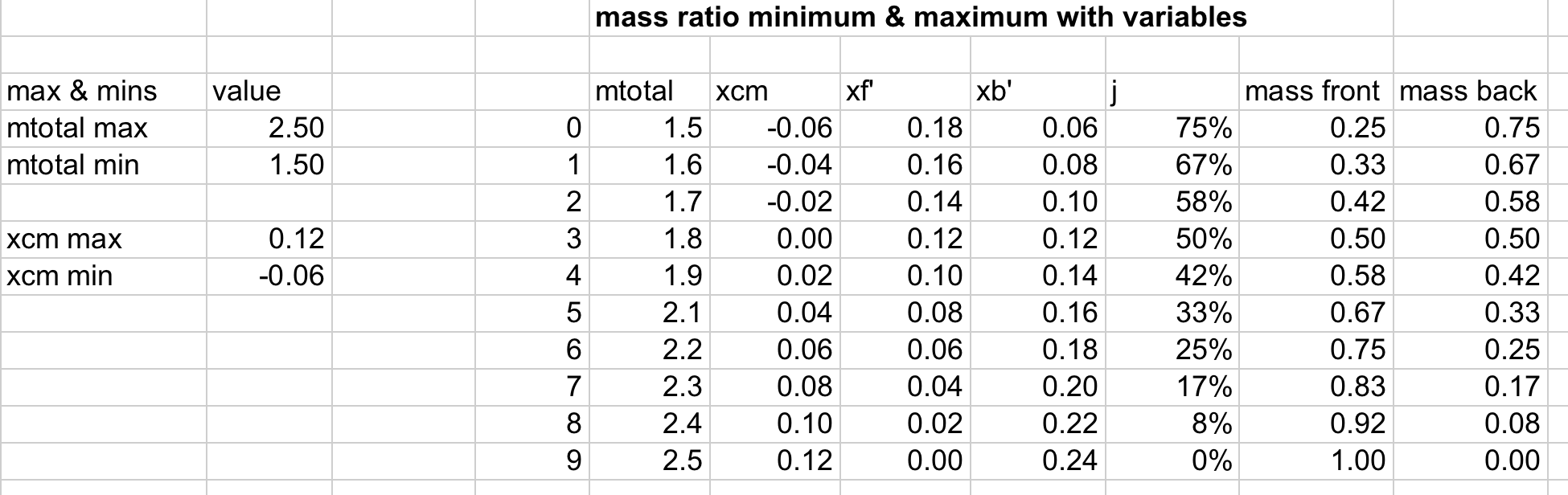
To generate the above graph, the offset is incremented from being a bit behind the reference point, to the very front of the robot. The total mass is also incremented from a minimum of 1.5kg to a max of 2.5kg.
Results - Scenarios
There are 5 scenarios that pertained to these results:
1) Wheel front global min
2) Wheel front global max
3) Ideal
4) Typical robot, distribution towards front
5) Robot carrying payload on arm
The results are multiplied by gravity
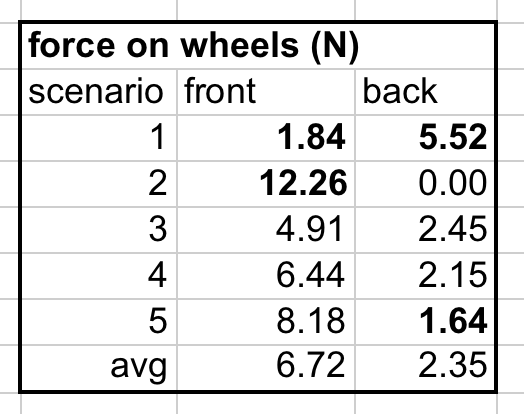
The maximum force for the front wheel is 12.26N, compared to 5.52N for the back wheel. It will be best to keep scenarios 3 and 4 in mind for the what we usually encounter with the robot.
Conclusion
The main result is that now we know ranges of force that we can apply to the wheel in simulation. This will lead to better design where we can balance less material usage with strength.
Creating this physics model will be useful to experiment with other wheel designs. (We have some ideas that we can't wait to try). Futuristically speaking, this is the starting point for using generative design.
The results from this will be used for the mass of the wheel to calculate the output wheel force, given the rated torque of the motor, while travelling up a sand dune (aka incline) - and determining if it will slip or not.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.