 BTom
BTomWe tried to keep the robot simple as possible. So we used raspberry pi 3, with arduinos, because there is lots of learning materials, easily to get, and open source.
We are using three different voltage levels.
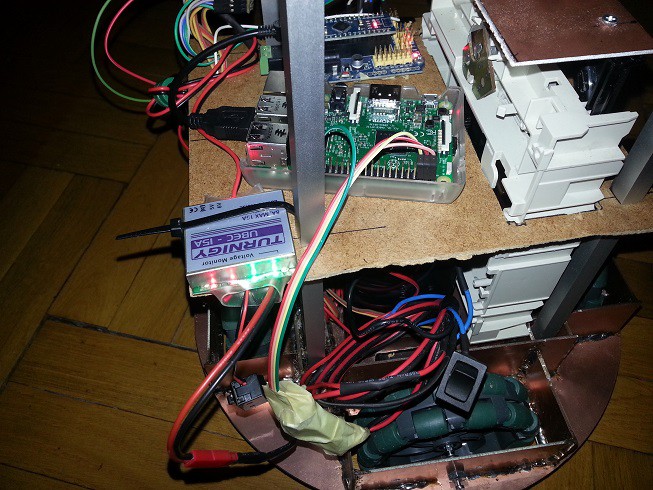
This is a work in progress picture with only one arduino, and the CD drive is not
For the raspberry Pi, we are using a simple voltage regulator connected to the battery, and the raspberry Pi 5V, and GND pins.
The Arduinos connected to the raspberry Pi via USB cable. Because we connected the voltage regulator directly to the Pi GPIO, we can supply enough power to the two arduinos, and the two cameras. This way we don't need to use a powered USB hub.
The servo motors need 6V to the maximum performance, but much more current than the raspberry Pi. So we used a separate electronic for this. We bought a Turnigy UBEC (15A). We used this device in the past. On the UBEC there is a voltage selector. We currently drive the servos with 5V.
For the elevator (the CD drive mechanic) we need 12V. We connected this to a relay switch, with two limit switches. The first arduino controlling the relay.
To simplify the development there is two switches. One for turning on the controllers, raspberry Pi, and arduinos. The other switch (built in the UBEC) is used to turn on the motors.
For the programing, and video feed testing we can turn on only the controllers.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.