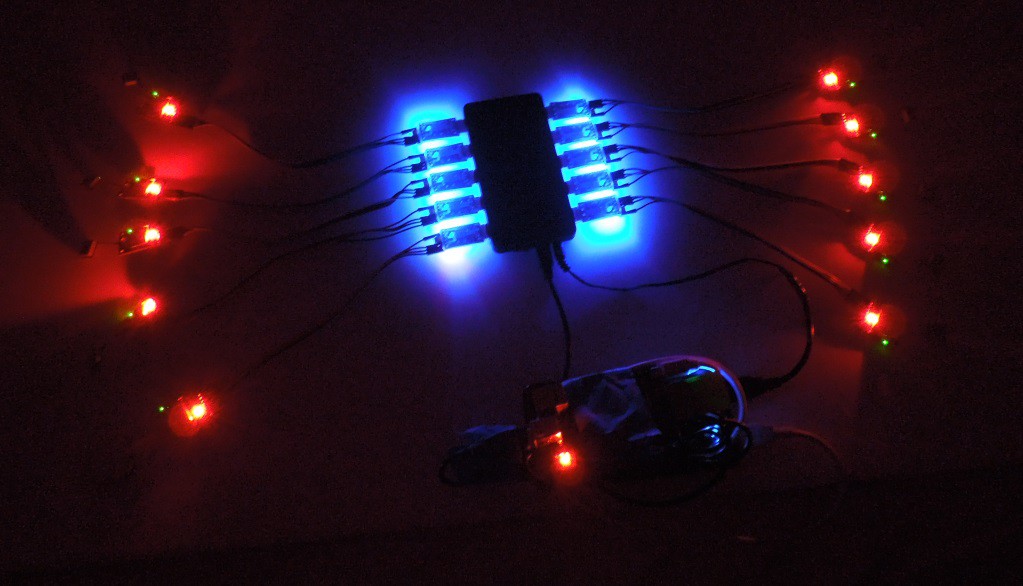
Repeating the first test but with CH340G USB to serial modules was successful. I was able to collect data and verify that the GPS modules position errors are mostly uncorrelated. All receivers are using the pedestrian motion model which is usually used for quadcopters and mobile robots. Data is being collected by a raspberry pi powered by a battery. They are taped together with blue painter's tape. The green lights are the blinking 1hz gps fix indicators.
For unknown reasons some of the modules performed much better than others. Standard deviations of ECEF coordinates for stationary receivers:
port#
131 std dev ecef xyz: 4.36733961451 5.38598533829 4.63016919654 count 25035
132 std dev ecef xyz: 5.61831775208 7.69243409578 9.95405542263 count 25034
133 std dev ecef xyz: 2.55442495355 3.82986851158 4.51910378608 count 25034
135 std dev ecef xyz: 2.12149753735 3.89156985078 3.78189588556 count 25033 M8N
136 std dev ecef xyz: 4.99567494154 5.33529922458 6.16849375111 count 25034 NEO 6 with battery
137 std dev ecef xyz: 2.82344410311 3.11478701186 3.80990062098 count 25034
1341 std dev ecef xyz: 2.34334818397 2.35146659893 2.87943477633 count 25035
1342 std dev ecef xyz: 1.994791898 3.09545183575 3.3114030156 count 25034
1344 std dev ecef xyz: 2.18281292001 3.1387471586 4.3756498617 count 25035
* One usb connector was loose and no data was recorded, it was omitted. So only 9 are being used
avg std dev ecef xyz: 1.15707392873 1.72618783161 2.03612534098 count 25033
Since the errors are partially correlated the result isn't as good as 1/3, but it has about half the error of any single receiver which would be expected from four which were uncorrelated.
A histogram shows that the distribution of the averaged receivers is tighter than a single receiver.
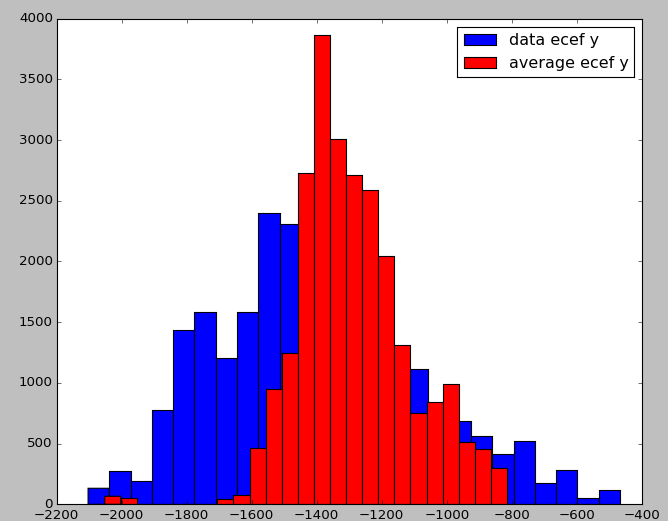
Since the data was taken indoors the deviation is quite large (the histogram is in cm matching the raw data from the GPS receiver). I forget why it is all shifted negative in the picture here.
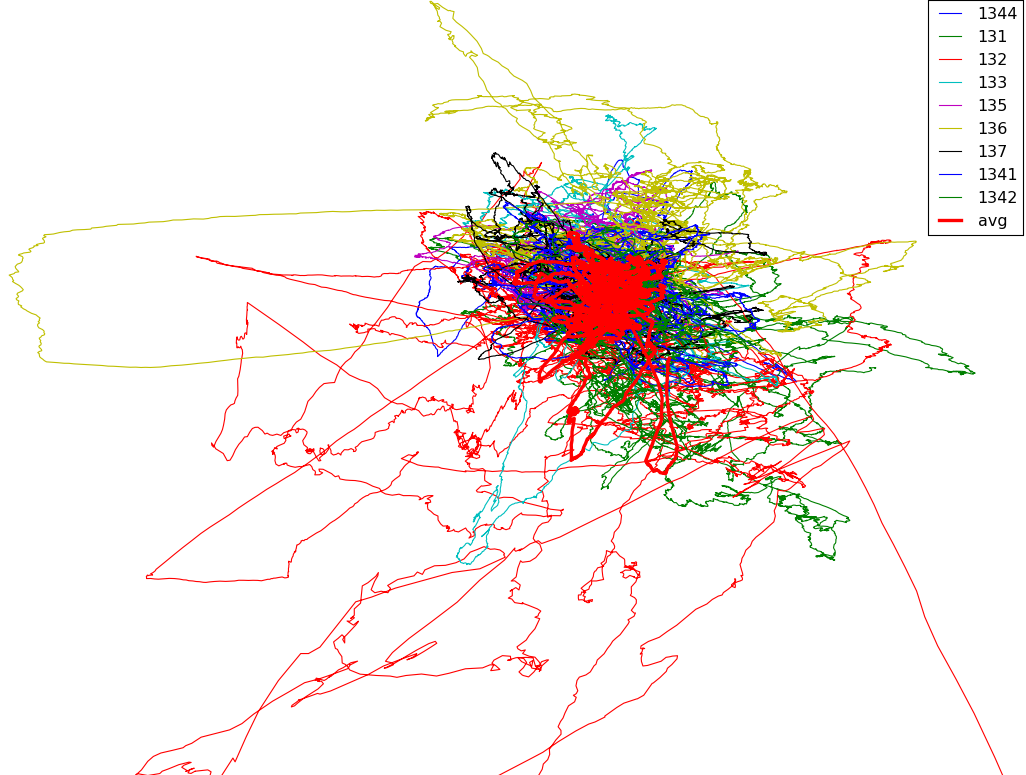
This blob covers about 30m. Outdoors with line of sight to satellites it should be significantly better.
In conclusion, it basically works.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.