 Norbert Heinz
Norbert HeinzCurrent feature list:
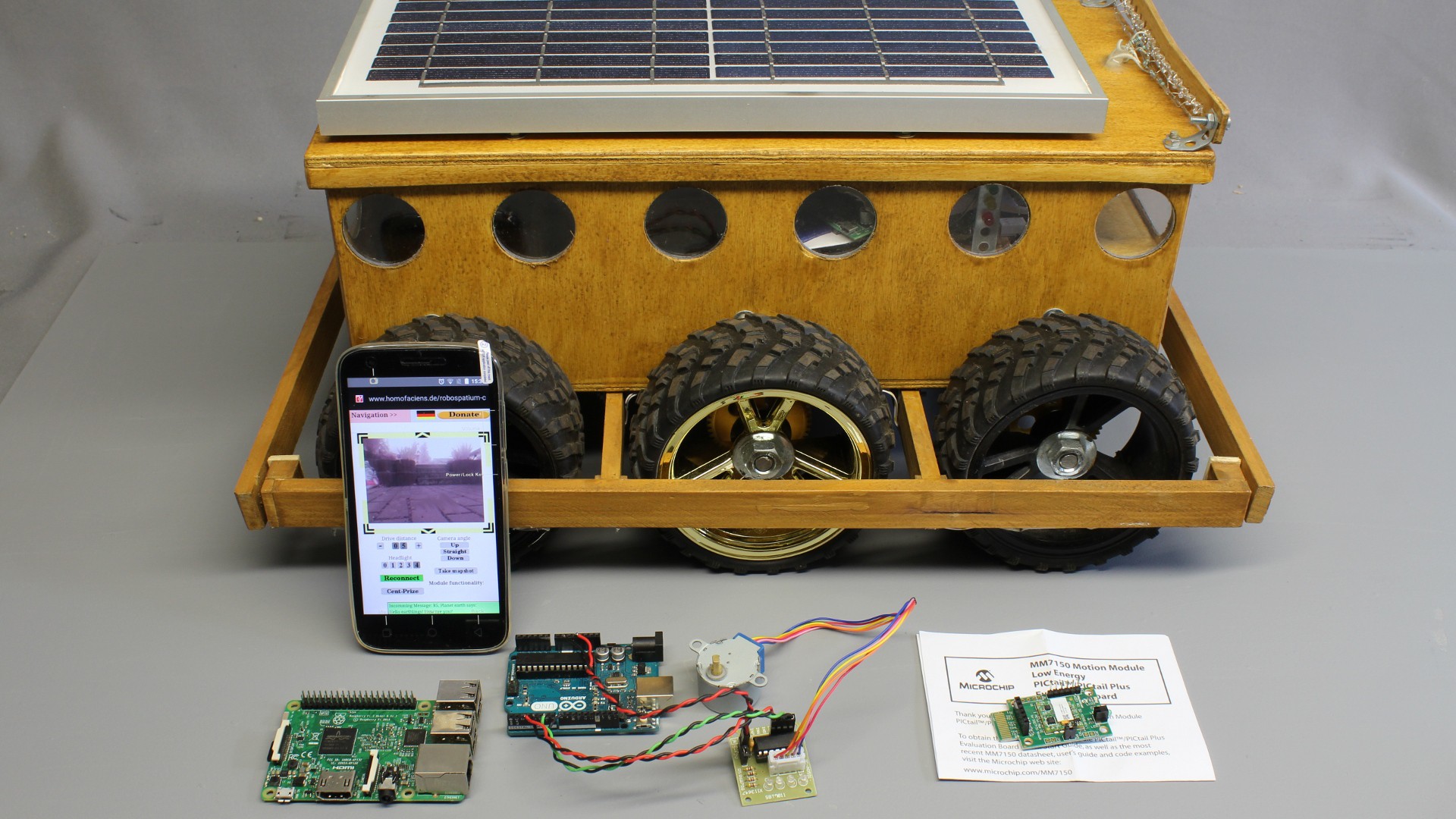
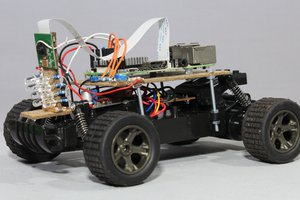
Raspberry Pi as host computer
Cameras (normal and IR)
Microcontroller to add analog inputs and for battery management
Bumper switches (simple collision detection)
Ultra sonic modules (avoid collisions)
Temperature sensors
Gyroscope / Accelerometer (tilt warning)
GPS
Microphone / Speakers (get in contact with alien species)
Infrared interface (remote control nearby objects)
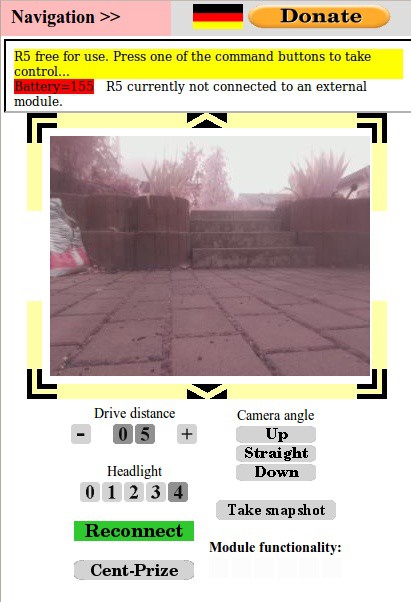
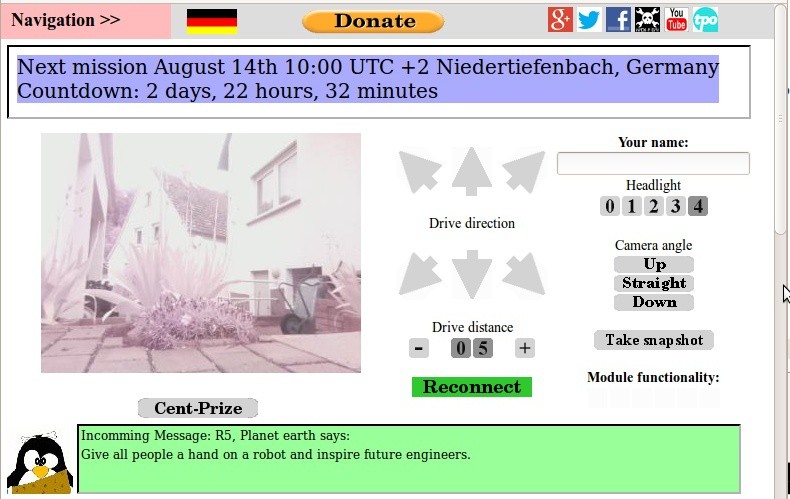
Drive my existing robots in my RoboSpatium:
Have a look at the project page:
http://homofaciens.de/robospatium-crowdfunding2016-01_en_navion.htm
or the R6 construction page:
http://homofaciens.de/technics-robots-R6-construction_en_navion.htm






 codersilver
codersilver
 SiliconSloth
SiliconSloth