 Endbots
EndbotsAvailable for purchase now on my website
https://www.endbots.com/products/endgame-robotics-dual-motor-esc
I have been building ant and beetle combat robots for a few years now and I have been frustrated at the lack of a good speed controller suitable for combat. Most available controllers are single channel only that are re purposed from brushless esc's the dual controllers are all much larger. This has driven me to develop my own speed controller.
It will have the following features
1.) Low cost (COMPLETE)
2.) Drive two motors on the same board (COMPLETE)
3.) Work with Beetleweight or smaller robots (Works with Antweight and smaller, would be suitable for most 2wd Beetles, but not 4wd bots)
4.) have a receiver attach directly to the board so as to eliminate unnecessary wires. (COMPLETE)
5.) Single sided board for easy construction (COMPLETE)
The video below shows my robot "Death by 1001 cuts" it is using my prototype. It ran perfectly the whole event and I placed in 3rd place out of 16 robots. The control was very responsive. I actually had to limit the rates because my reflexes are not fast enough.

 nerd.king
nerd.king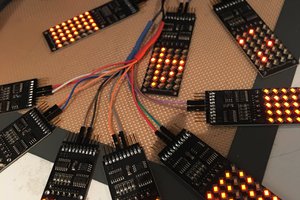
 Bob Coggeshall
Bob Coggeshall
 Pontus Borg
Pontus Borg
 Holotype Robotics
Holotype Robotics
wouldn't it be easier to use the uart protocol and set up the first byte to mean which motor and second byte to mean throttle? (you might have to use a start-byte and end-byte)...
D: But sure, great job mayne.