This idea came to me like 2 years ago, working giving maintenance to cnc's machines and developing plasma cutters it just felt right to start with the idea of developing something that can follows your feet and move your body in response. I need to develop a prototype and i hope i can do it before the Human Computer Interface Challenge starts. For now i have to upload some animations and maybe a list of components.
0%
0%
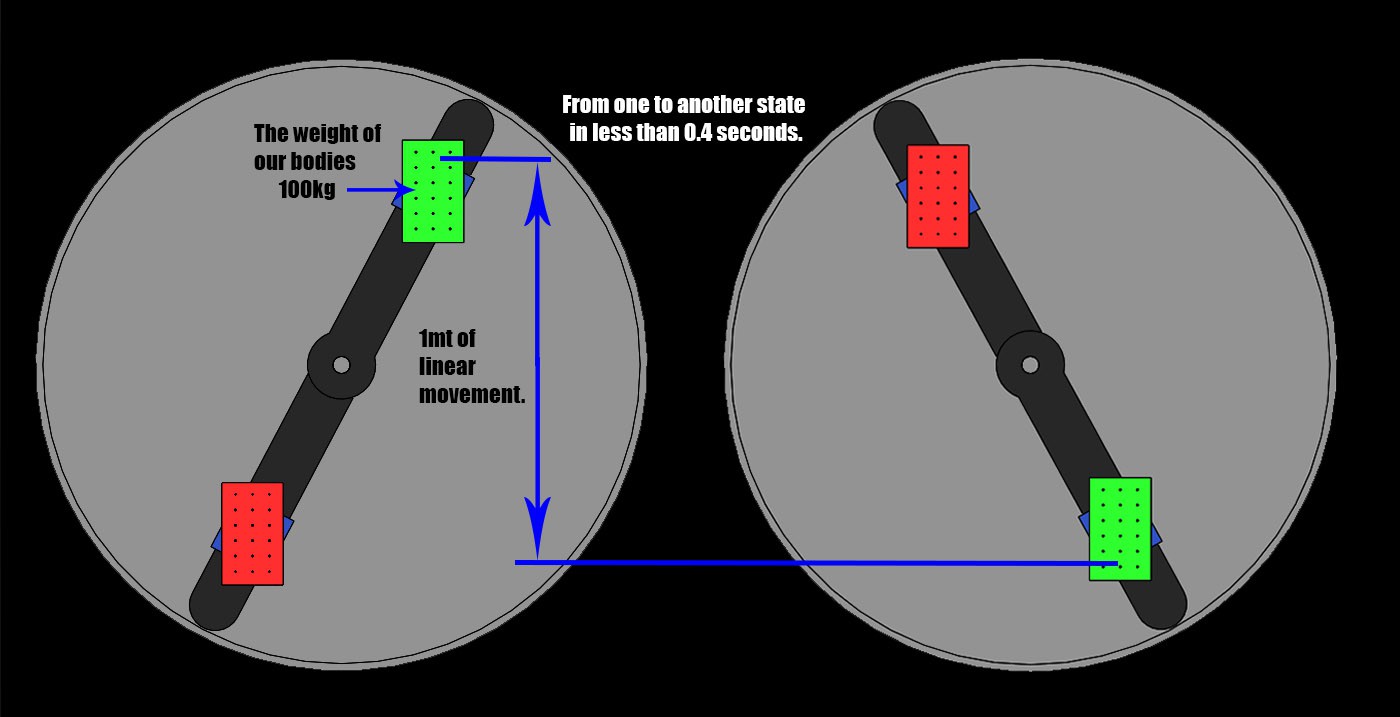
"The Clock" Omnidirectional Treadmill
The treadmill we were waiting for.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 WalkerDev
WalkerDev
 bobricius
bobricius
 A1ex-13
A1ex-13
Nice information!! Omni directional treadmill is act as a support system while playing VR games. KAT Walk Mini is small in size and easy to place at home, because of these key factors it is most poplar odt available in the market. Twisted reality is distributor of KAT VR in USA. More in fo you can visit: https://www.twistedrealityarvr.com/