 Lucy Fauth
Lucy FauthWell, that's it. On github you can find all the code you need. If you're on this level you probably don't need any additional advice. Grab a STM32 bluepill board, an IGBT module or discrete TO220 MOSFETs, build up a gate driver, get a 200VDC current source and thats it! Please note that if you use a rectified variac as I did, all the circuitry is on main potential, including the connections going to the pump, button and the LC display. If you can isolate them, that's fine.
Software is pretty easy, it's based on my software for hoverboard hacking so don't wonder if there are some weird variable names left. Also this firmware doesn't provide any safety features, eg. you might want to disable the driver if the TMP doesn't reach full speed after ~10min because of a leakage or whatever. Also you probable need to tune few parameters to get this working smoothly with a TMP other than the TURBOVAC 50. If you use different gate drivers than IR2110S (that's what I used) you might have to change the polarity of the PWM output. You can do so by editing these two lines of the STM32 timer config: https://github.com/NiklasFauth/stm32-turbotronik/blob/a7abe94c0da98adead3f7866da5f545ef9d77592/Src/setup.c#L339
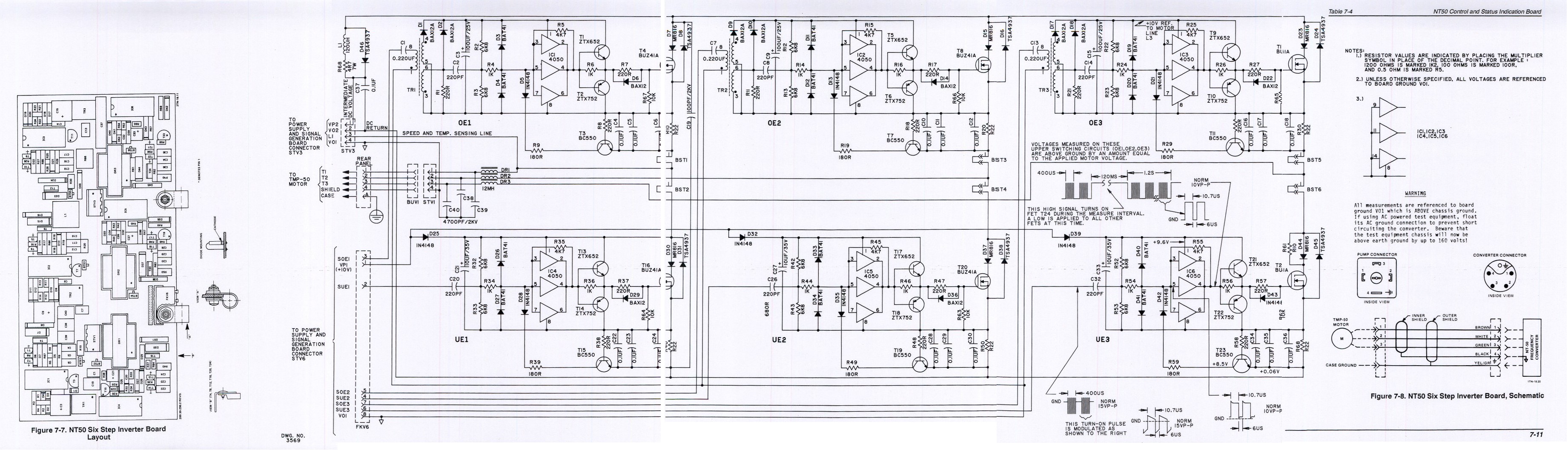
The circuit is simplified and does of course require some more components like 5V & 15V power supply for gate drivers and the bluepill, as well as input and output smoothing for the power electronics. As I had the original (broken) controller at hands, I simply unsoldered all the output filtering components and placed them together with gate drivers on a custom pcb (the green one in the first messy picture). To get an idea what you need, here is the schematic of the original controller. It's mainly those 12mH inductors and 4.7nF capacitors you might want to add.

 PointyOintment
PointyOintment
 MrC0de
MrC0de
 Andrey V
Andrey V
 Androiders
Androiders
Thank you for this project. As it so happens, I managed to get a hold on a cheap turbovac 50 without a controller, so I would be more than interested to build this project. Are there any a bit more detailed part list or directions how to build this? I have some experience on electronics but apparently not enough...
Thanks