 Roger
Roger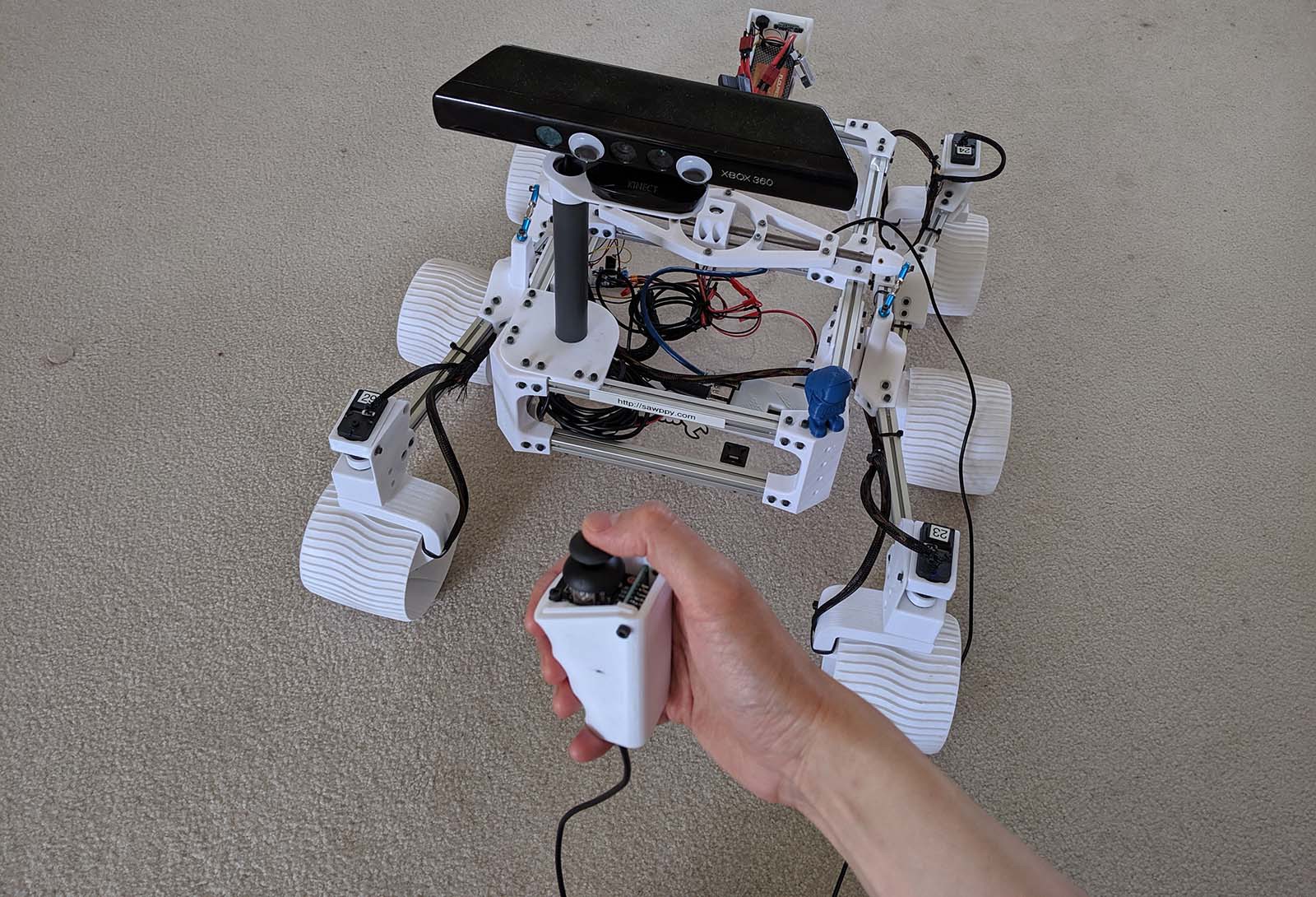
As a presenter it was great to see the wealth of information provided by Maker Faire Bay Area organizers. It is clearly the compilation of many years of experience and lessons learned. One item caught my eye: anyone using wireless communication should have a contingency plan in case wireless fails.
I've definitely encountered this before with SGVHAK Rover and Sawppy on the standard 2.4GHz WiFi band. So far I've been able to avoid most problems by adding a dual-band router and moving up to the 5 GHz band, but in a large event like the flagship Maker Faire, even that might not be enough.
So as part of my Maker Faire prep work, I designed and built a wired joystick controller with an Arduino as the microprocessor. When active, it replaces the Raspberry Pi and wireless router on board Sawppy. This also serves as a lower-cost alternative to rover builders or those who like the thought of walking their rovers on a leash.
More resources:
- Arduino sketch is in the 'arduino_sawppy' directory of Sawppy's Github repository.
- 3D-printed enclosure Onshape CAD document.
- Build log entries:
- Getting started with Arduino crash course.
- Examining Arduino sample code by LewanSoul for LX-16A serial bus servos.
- Putting Arduino joystick sample code together with LewanSoul sample code for joystick-based servo control.
- Implementing the Ackermann steering calculation for rover corner wheel steering.
- Switching to a compact Arduino Nano board to fit in handle.
- Designing the 3D-printed enclosure.
- Building Sawppy's onboard input jack.
- Up and running and ready for Maker Faire!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
More stuff of yours for me to copy and use! yay!!
Seriously though, this is great. It shouldn't be too crazy to adapt the steering to work with my geared steppers.
Are you sure? yes | no
I'm happy to hear you are going to copy and use it! I wrote it with different drive mechanisms in mind for rovers like yours. LewanSoul servo code are placed in #ifdef LEWANSOUL blocks and can easily be swapped out for different motors like yours.
Are you sure? yes | no