With the sensor case and electronics complete it’s time to put our sensors on a real robot and unleash it into the wild! We’ll be using a Turtlebot3 Burger from Robotis because it’s one of the most popular educational robotics platforms and we already have one handy. We decided to mount three sensors on our Burger to enable better sensitivity.

The Burger is conveniently built as a series of “plates,” with each plate comprising a level that holds electronics/motors/sensors. We’ll just be adding a level to the Burger that holds three of our radiation sensors, along with an arduino to interface with the onboard Raspberry Pi via ROS.
To enable simple sensor mounting, we 3D printed a ring that interfaces with the holes on the Burger and has attachment points for the sensor case mounts.
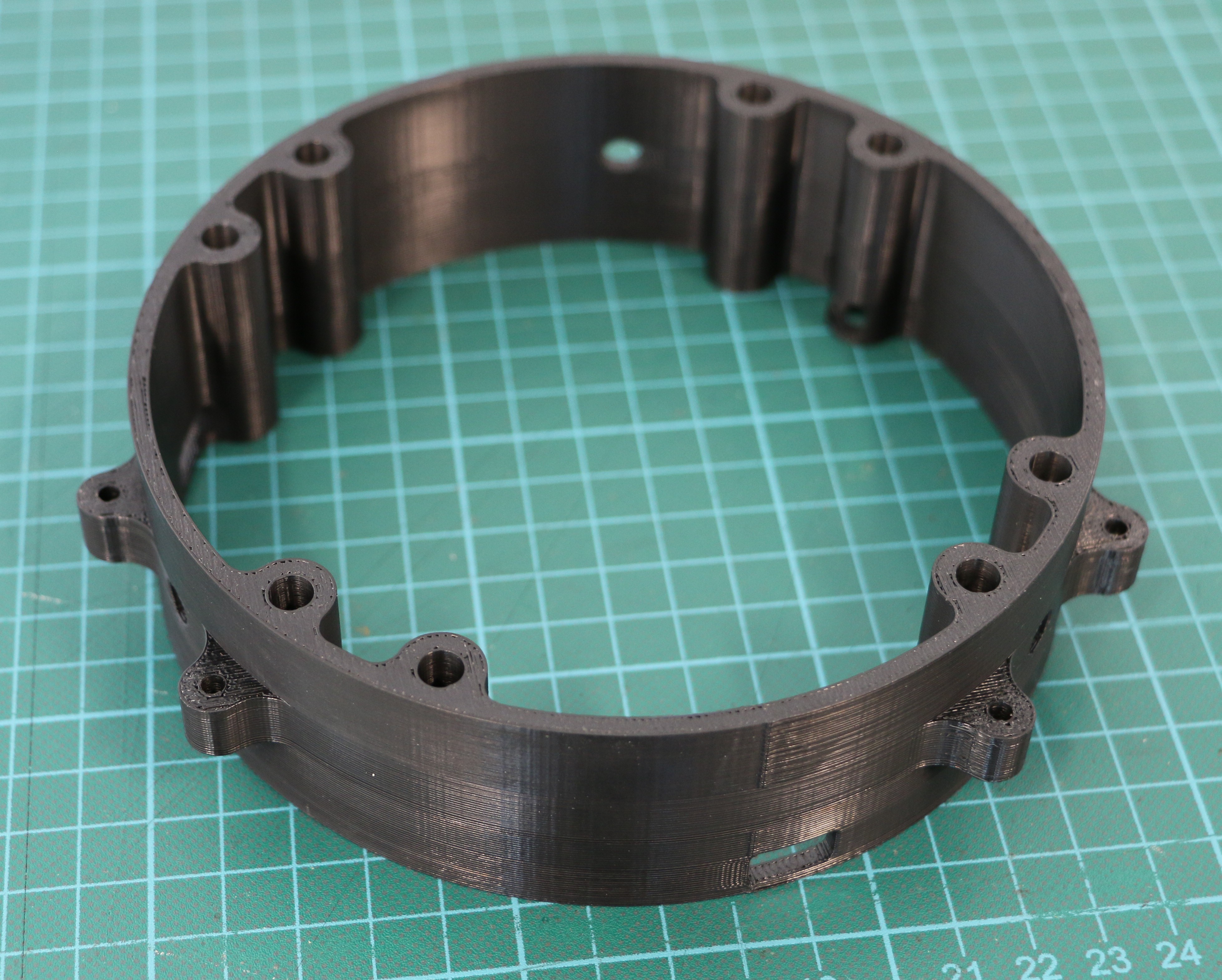
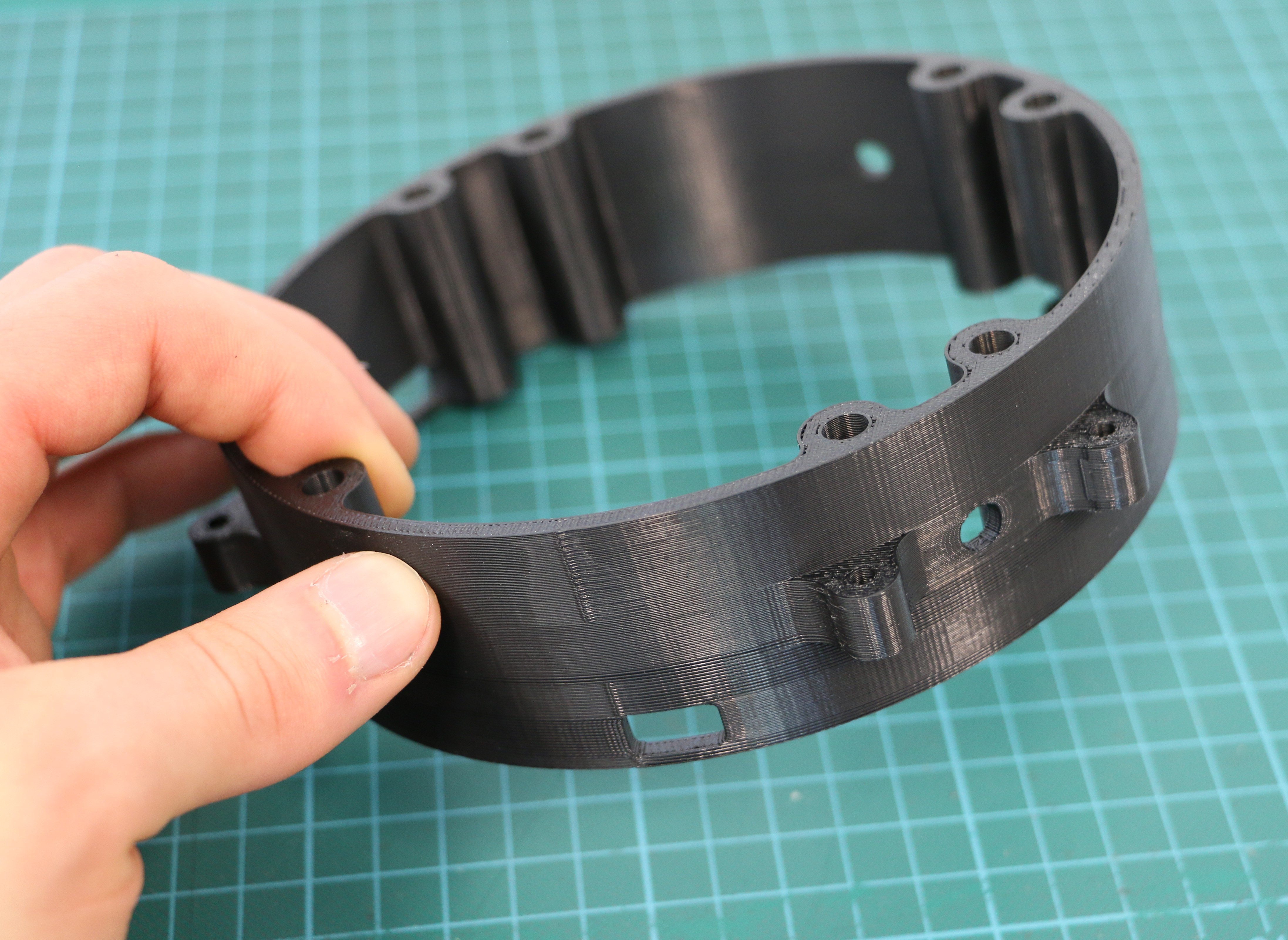
Fortunately the ring turned out well on the first try, so we put it on the Turtlebot3, connected everything with the arduino inside, and put the top plate back on. See the instructions for more details on this assembly process.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.