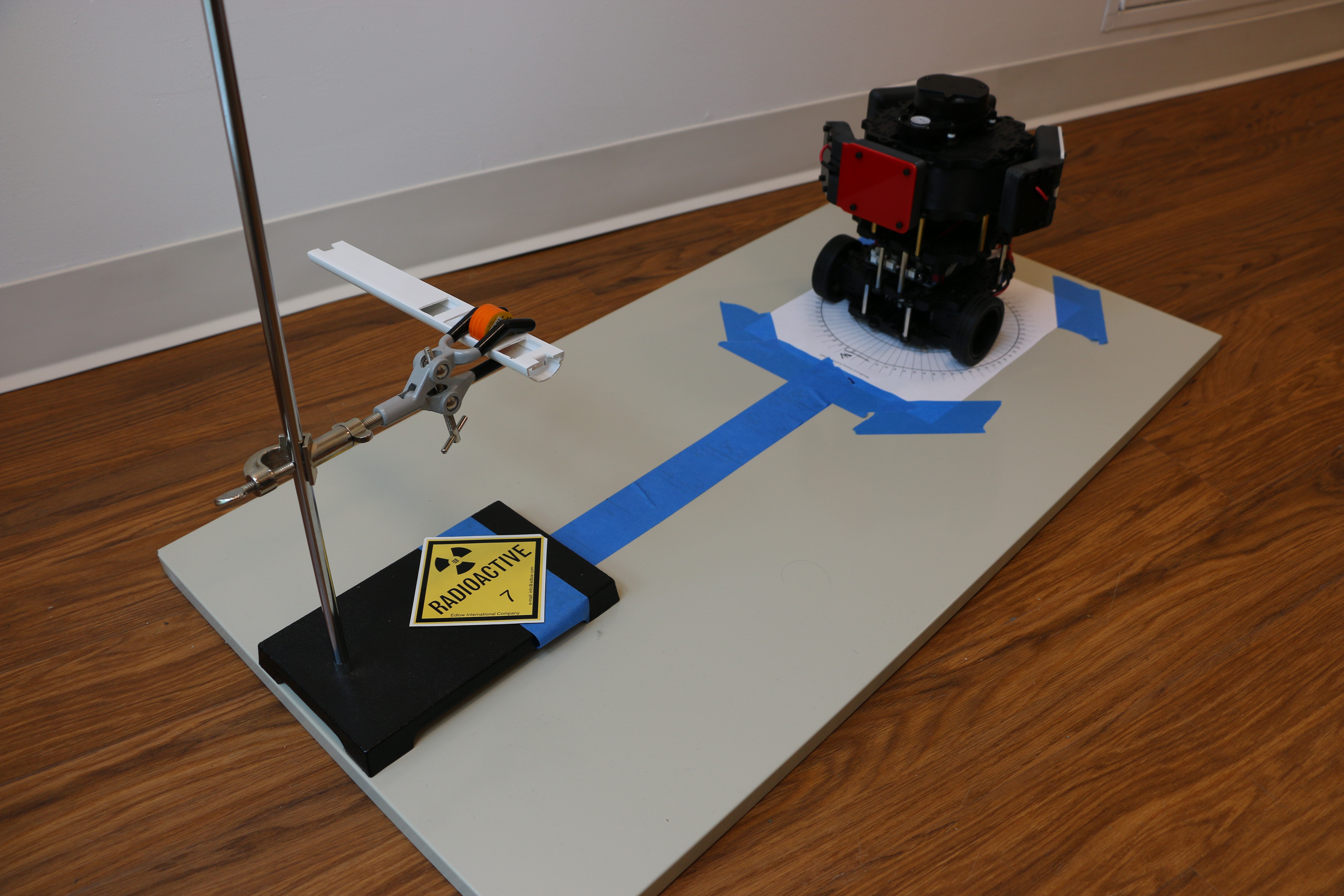
After we built our sensor and mounted it to the Turtlebot 3, we ran it in a stationary mode to collect some test data. We placed four small radiation test sources in a holder at the height of the sensors, and positioned the robot between 8 and 24 inches away from the sources (measured from the center of the robot). We denoted the detector facing the sources as "detector 1."
We used two Co-60 and two Cs-137 sources together. Each has an activity of about 0.5µCi (~18500 decays/second), so all-together they emit about 74000 gamma particles per second in all directions. While this sounds a lot, the sources are actually relatively weak and are meant to be used for educational purposes.
The detection rates are much smaller mainly due to two reasons. First, the area of the detector is small compared to the area where particles could be (surface of a sphere with sources at center and radius equal to distance of detectors to sources). Second, the detectors have a very low efficiency, so not every gamma photon crossing a detector is actually detected. Another reducing effect, absorption of the radiation in air, is relatively small compared to the first two.
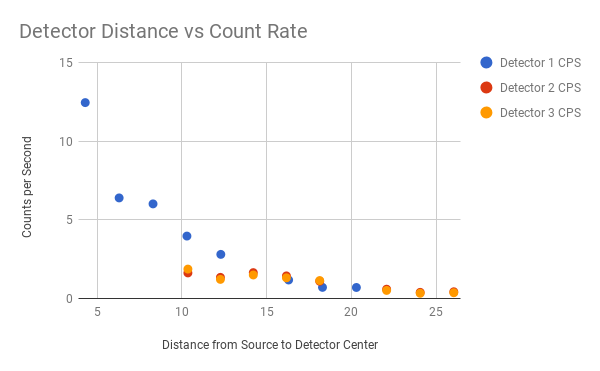
In the figure above, you can see that the count rate decreases with the square of the distance to the sources. At each distance, we measured for about 10 minutes, and the distance listed is the distance from the source to the center of the detector. The count rates for the two detectors further away are smaller because they expose a smaller detection area to the source. The figure also shows a limitation of our robot - not much more than two feet away from the sources (at the given activity levels), the signal will be hard to impossible to distinguish from the background. So a scanning robot will have to get close!
Based on these measurements, we will now go on and combine radiation measurements with mapping of the room based on the LIDAR sensor and a SLAM algorithm.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.