 Alfonso Troya
Alfonso TroyaNow that we have demonstrated in the simulation that it is possible to compute an odometry using the simulated version of the IMcoders, it is time to make some tests with a real robot.
In order to do that we need a robot. After looking some of them, we finally decided to use a commercial one, the Jumping Race MAX from Parrot. It has an open API , this API will ease the testing and algorithm verification as we don't have to modify the hardware to control it.
Here it is next to the IMcoders:
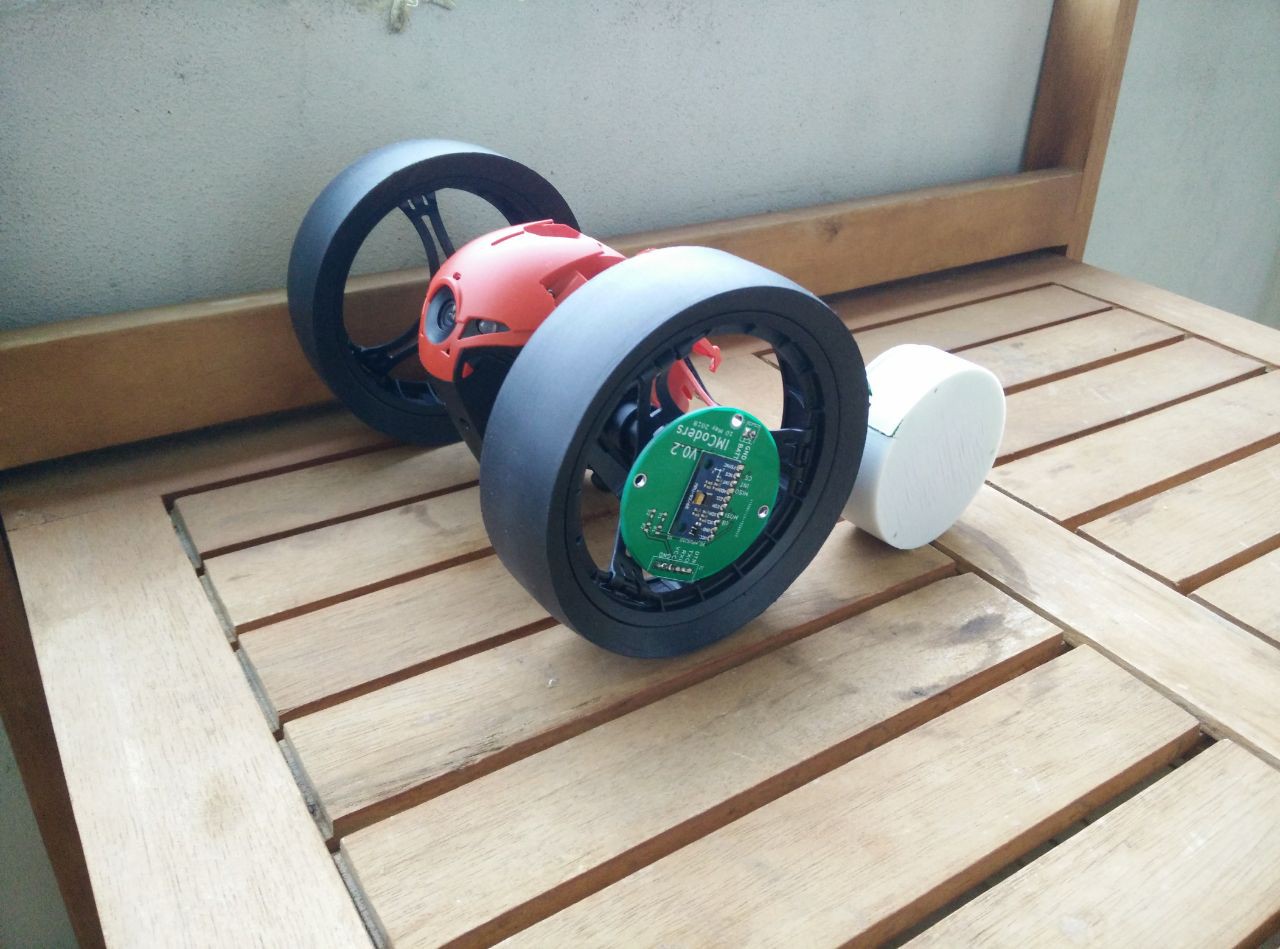
We thought it had metal rims so we could attach the sensors with magnets. Unfortunately, they are made of plastic. No worries, a 3D printer is making our lives easier.
After a couple of hours for designing and printing, we have our attaching system which allows us to attach an detach the IMcoders really easy.
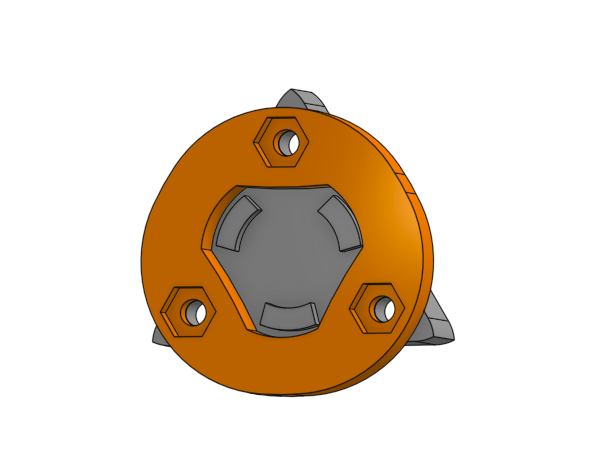
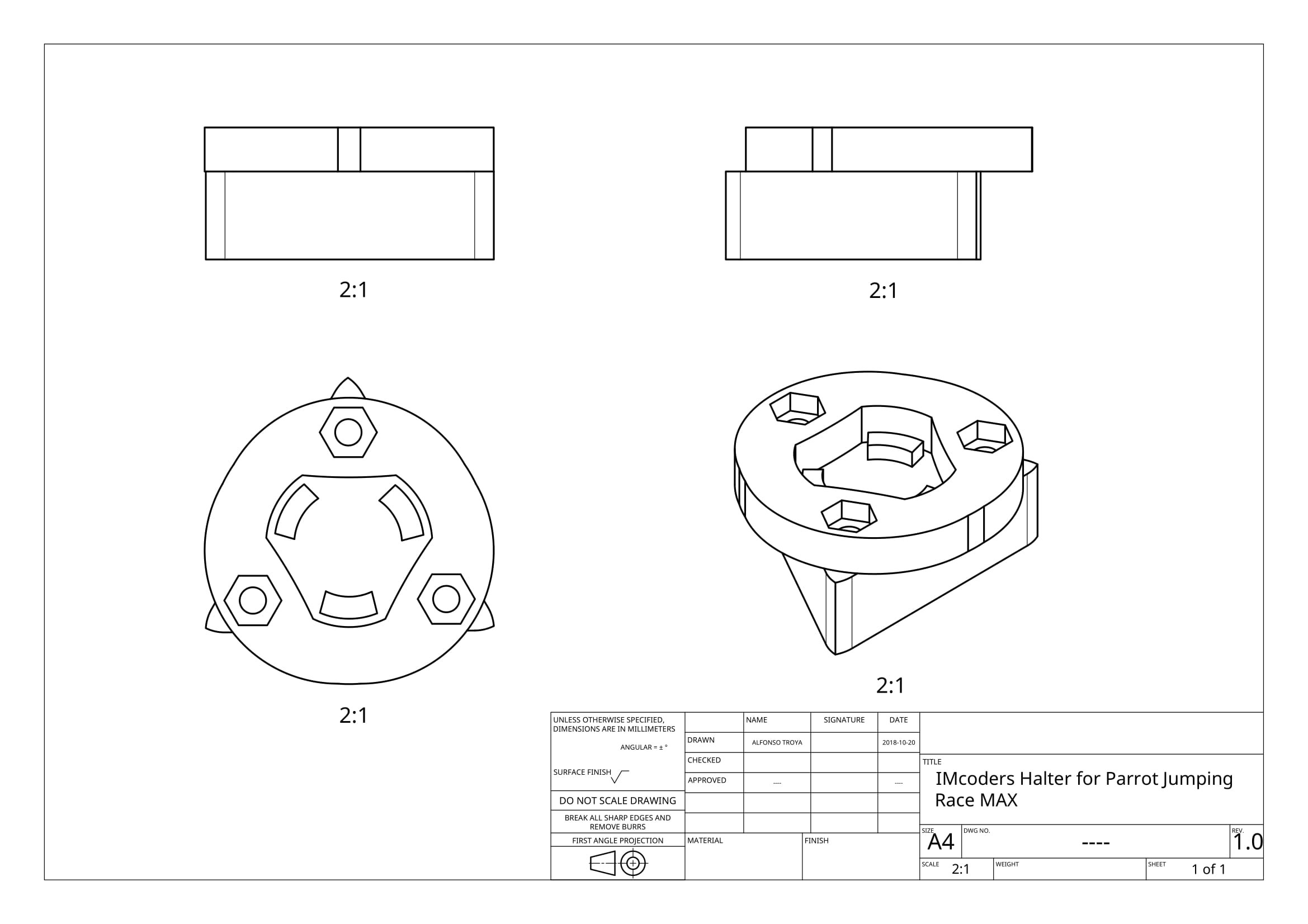
Some hours later, after waiting for the 3D printer finish, we have holders for our sensors!.
Here you can see the result:
Not bad, eh? As you can see, the mechanism to attach and detach the module is working pretty good. This is the final looking of the robot with IMcoders:

The robot has a differential steering and so has the simulated robot we developed the algorithm for. We just have to modify some parameters in our simulation model to match the real robot and our sensors will be ready to provide odometry.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.