 MakersBox
MakersBoxIf accuracy and precision are the goals, then most of the design decisions will rotate around the stepper motor (pun intended). The geared 28byj48 steppers (http://a.co/8bPbFhK) I've been using are incredibly cheap and work reasonably well, but they have both rotational errors from the backlash gears and axial errors from slop in the bearings. If you have ever watched a 3D printer or CNC milling machine do its thing, you know that those errors have been virtually eliminated. Most hobby grade machines use bipolar 2-phase stepper motors, so that is where we start. At about $15 each, our Turtle build is already at about half the budget of my normal robot, but hey, we are not counting costs on this one, right?
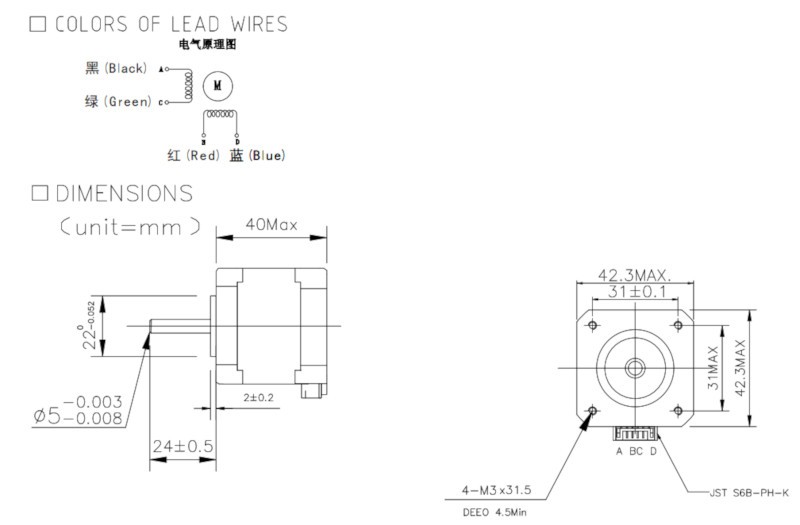
I'm going to be using the DFRobot hybrid stepper (https://www.dfrobot.com/product-785.html). I honestly don't know what the "hybrid" means. Perusing the data sheet, we know the following:
- It is heavy, so my normal light-weight chassis design is going to need some beefing up.
- It draws a lot of current, so 4 x AA batteries are not going to cut it.
- It has a 5 mm shaft, with a single flat surface so my current wheel design will need rework.
Here are my starting thoughts on design:
- Size the chassis based on having the steppers butting up against the pen/servo assembly to stiffen the chassis. Hopefully we can keep it within 150 mm square so I can still 3D print it on my printer.
- Use "C" sized batteries, which will provide a significant increase in capacity. The stepper shield specifies 8 - 35V, so I'm thinking 6 cells x 1.5 = 9V. Those plus the steppers are going to represent most of the weight of the unit.
- DFRobot has a large wheel that looked good, but was out of stock. It does uses an interesting coupling that I think I can design a 3D printed wheel around to provide something robust.
First things first, we need to get our hands on the hardware and learn to make the steppers move . . .
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.