 BaiLiping
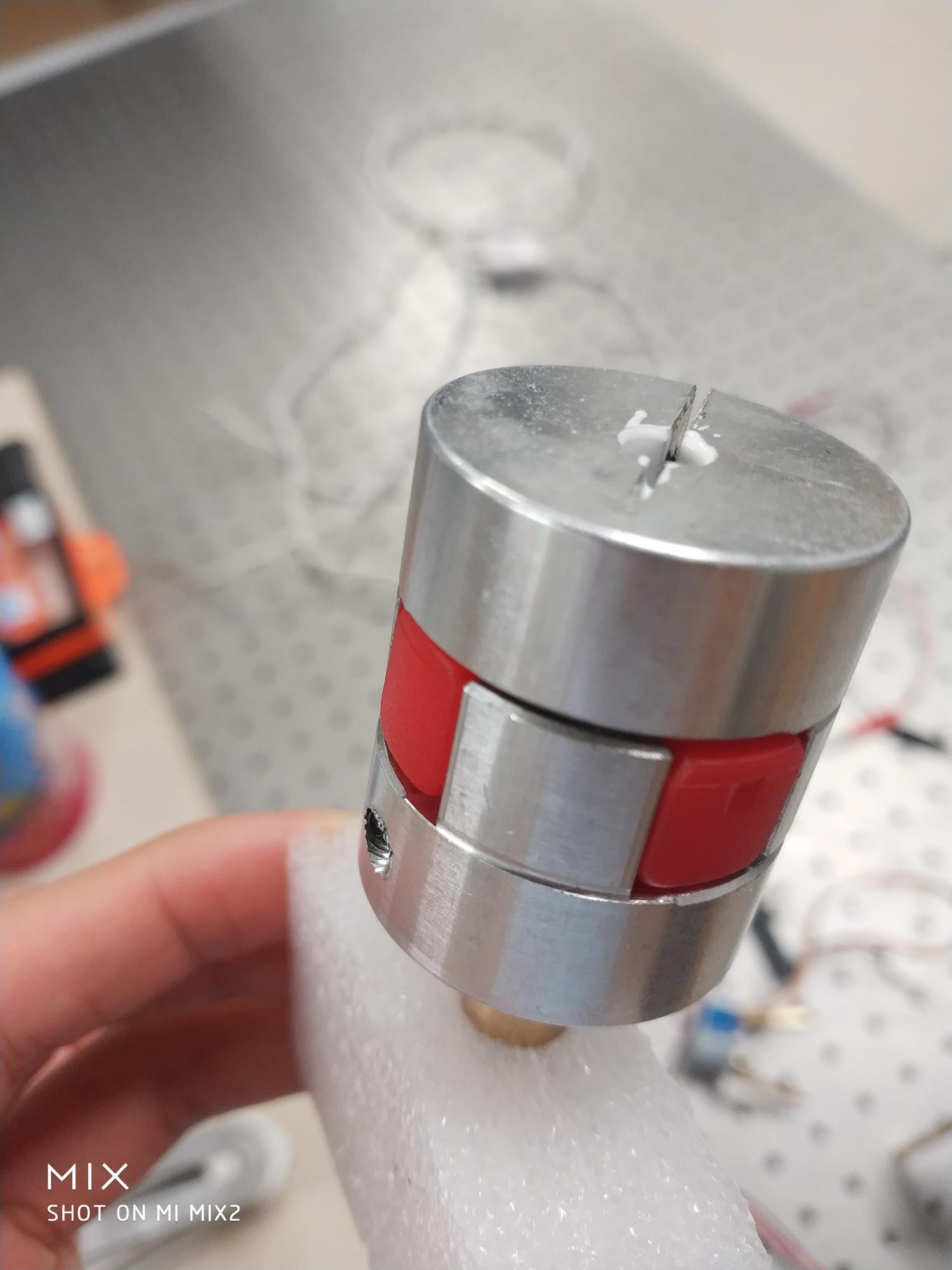
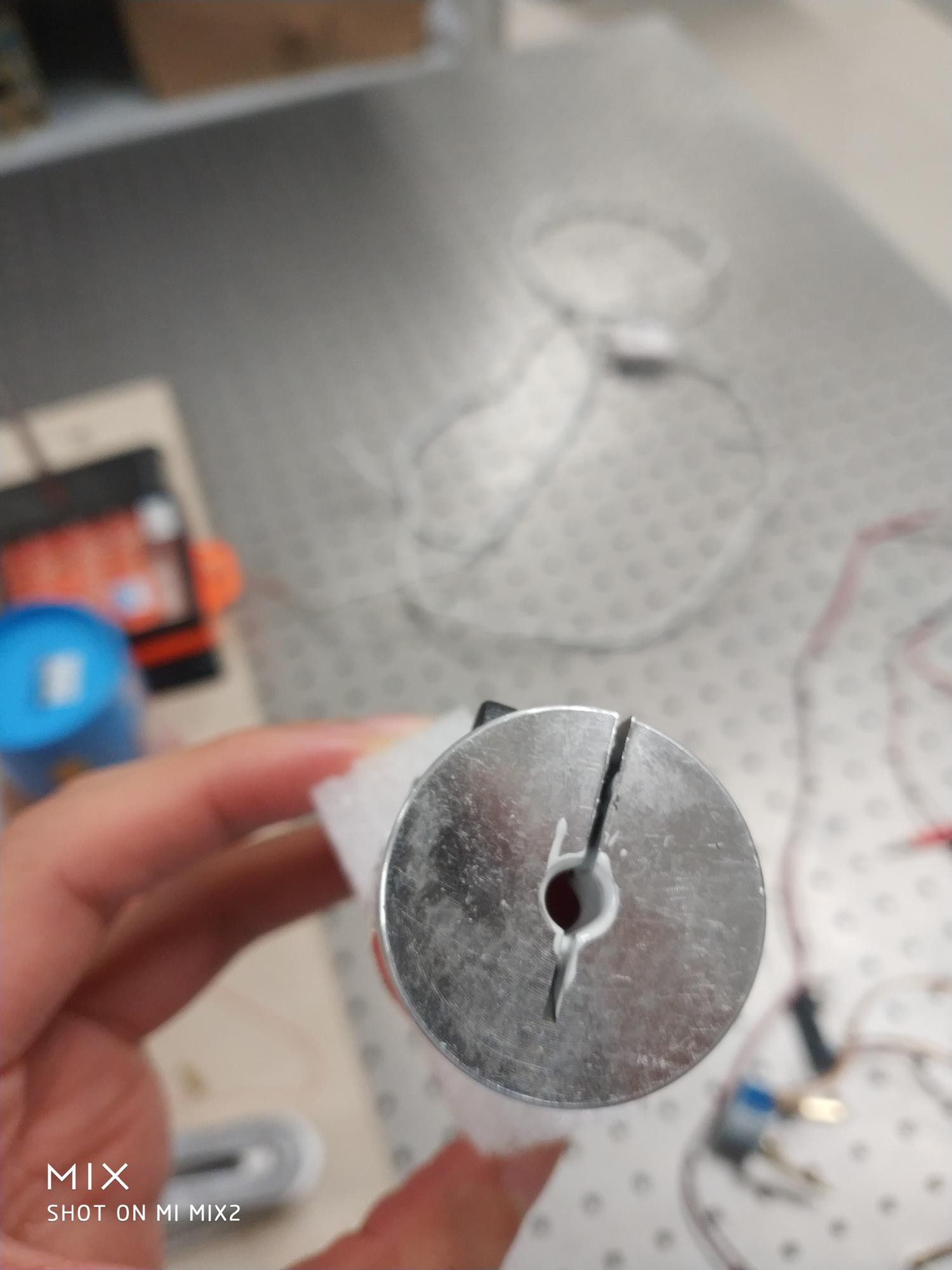
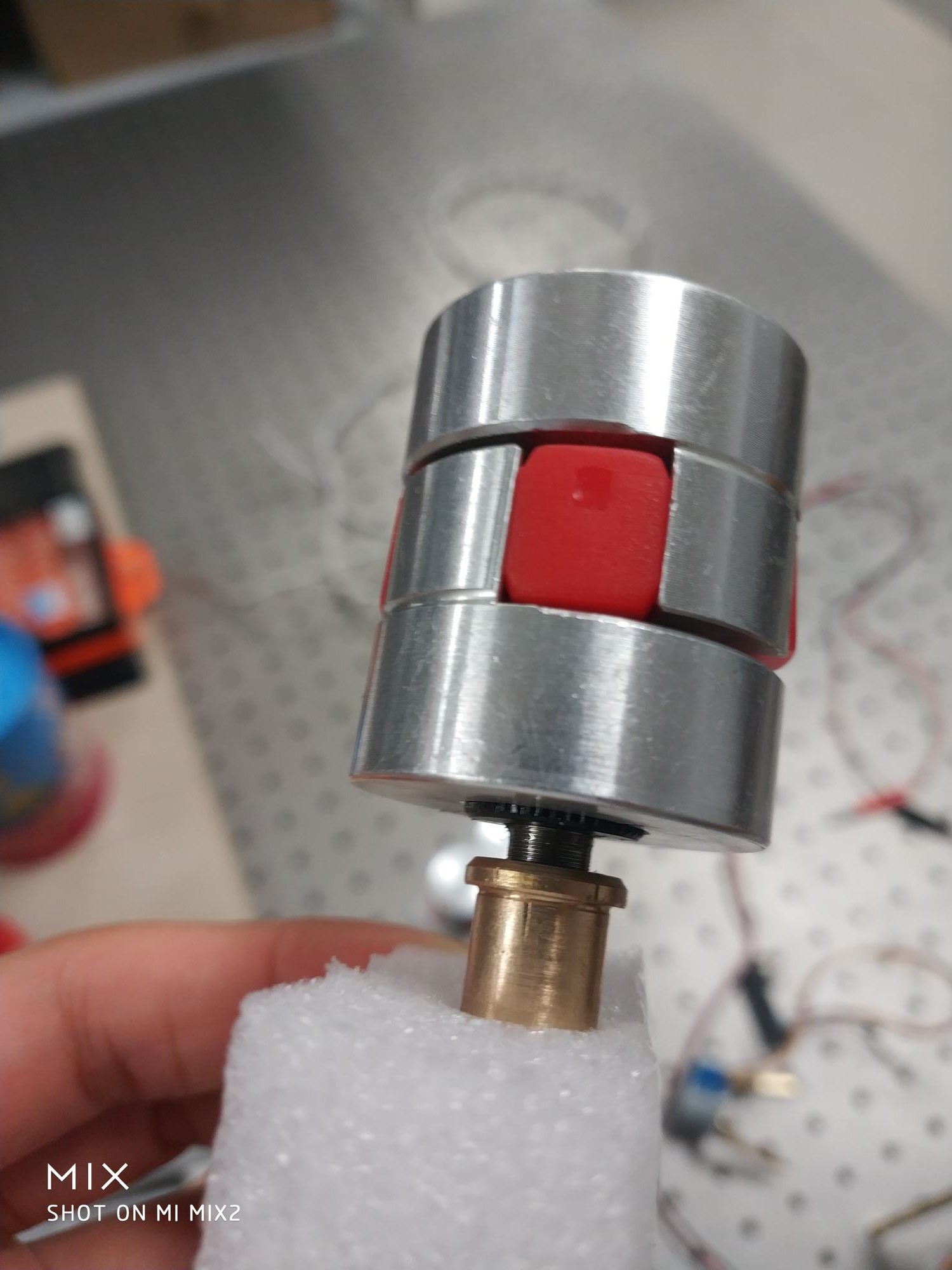
BaiLipingTurns out, Epoxy is a lousy structural glue. It can't hold up the force. Another issue is the original gliding design for the stepper z-axis movement did not work out. Therefore, change of plan. I find a supplier which manufacturing customized connectors. So I ordered one with 15mm hole on the one end and 5mm hole on the other. It is made of Aluminum, but I am still a bit worried if the steppers are strong enough to move all of those. So I added a thin layer of silica on the 5mm hole to increase the friction.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.