 Neha
Neha
The purpose of this project is to make a drone that can follow a line on the ground using computer vision. I will be working on this with a partner in the computer systems lab. This project can be later applied for environmental purposes, instead of following a line it could be implemented to follow a river and map or monitor the ecosystem there. Many remotely controlled drones are already being used for environmental purposes such as observing endangered species to prevent poaching and monitoring wildfires. Having a drone that does not need to be remotely controlled would increase the amount of time the drone can be used as well as make the drone more cost effective. As for the drone building aspect, there are websites on how to build a drone however these drones are typically made to be remote controlled.
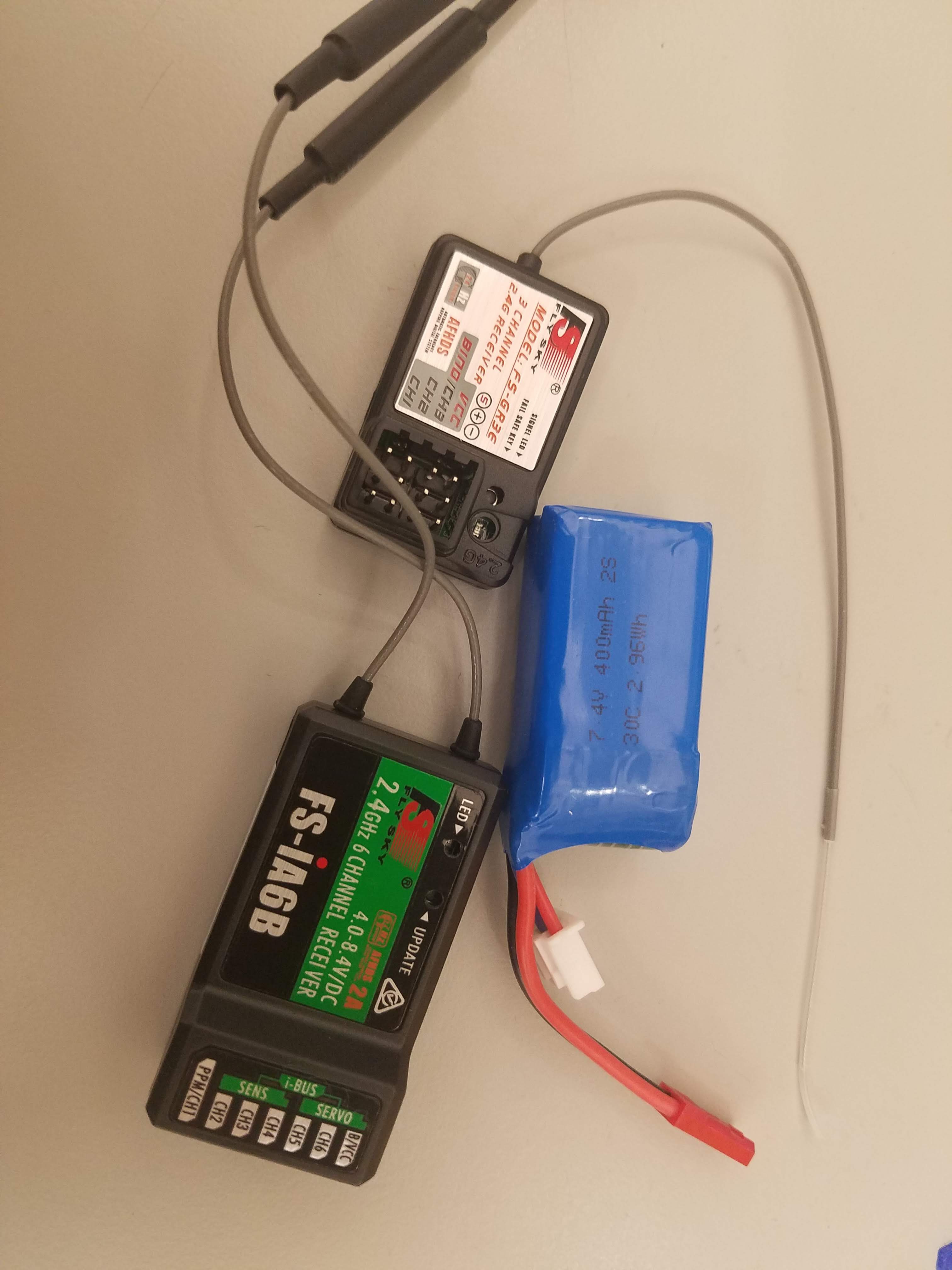
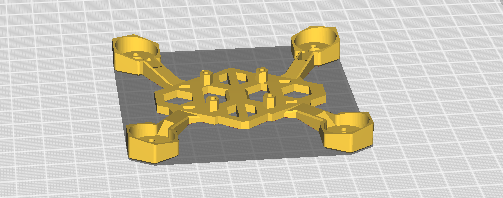
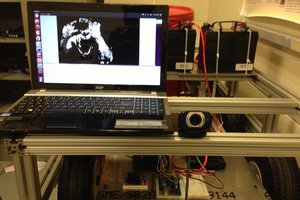
The drone I will build has to be able to fly autonomously based on the video it takes. To do this project, the drone and the computer vision software have to be worked on at the same time and then later combined. My aspect of the project will be building a drone with a camera, initially the drone will be remotely controlled. My partner in the computer systems lab has talked to previous seniors who have done a computer vision project involving video processing.Then the drone will be programmed to work with the image processing software. The goal of this project is to be able to place any tape line on the floor with curves and turns and have the drone be able to follow it.






 Tom Quartararo
Tom Quartararo
 Gino Clement
Gino Clement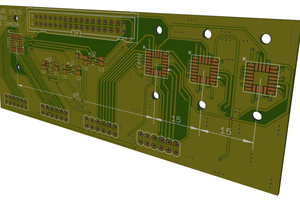
 John Evans
John Evans