 Nathan Brown
Nathan BrownSo the last log was about determining that I would need a 6480:1 reduction to get a 1ars-second resolution from a 1.8 degree stepper motor. As other have pointed out (see Backlash section here), gears can be a little problematic, so the next obvious choice is timing belts. While not 100% backlash free they are a very inexpensive way to make a "reduced" backlash system.
So lets create ourselves a GT2 (2mm pitch) timing belt system to get us to that reduction. But first some goals:
- Target of at least 6480:1 reduction
- Flexible enough that I can add or remove reduction if I need to
- By printable on my ~210mm print area (which would include the box housing)
I happen to live close enough to drive to my favorite on-line supply shop MPJA.COM. They happen to carry a good variety of GT2 belt loops in the "standard" 6mm width used by most 3d printers. The belt sizes that they stock are 158, 188, 200, 260, 280, 400, 610, & 852mm. So if I want to make a reasonably sized reduction box I should probably not have anything too big, but on the other hand it would be nice if I could make the box flexible enough that I could add some extra stages (add more reduction) if I needed to.
Wait... why am I starting with the belt sizes instead of doing the math first? Well... there are a couple of things about GT2 belt systems that we know. First, for 2mm pitch belts any pulley < 20 tooth does not really have enough engagement with the belt so we will limit out small size pulley to 20 tooth. Next, we don't want to deal with an overly sized reduction box. To make use of the 400mm belt above we would have to use a 150+ tool pulley which would be ~100mm in diameter which kind of make the this a little too large. So the next size down is 280mm belt. Lets just see if we can make something that works out to some nice round number?
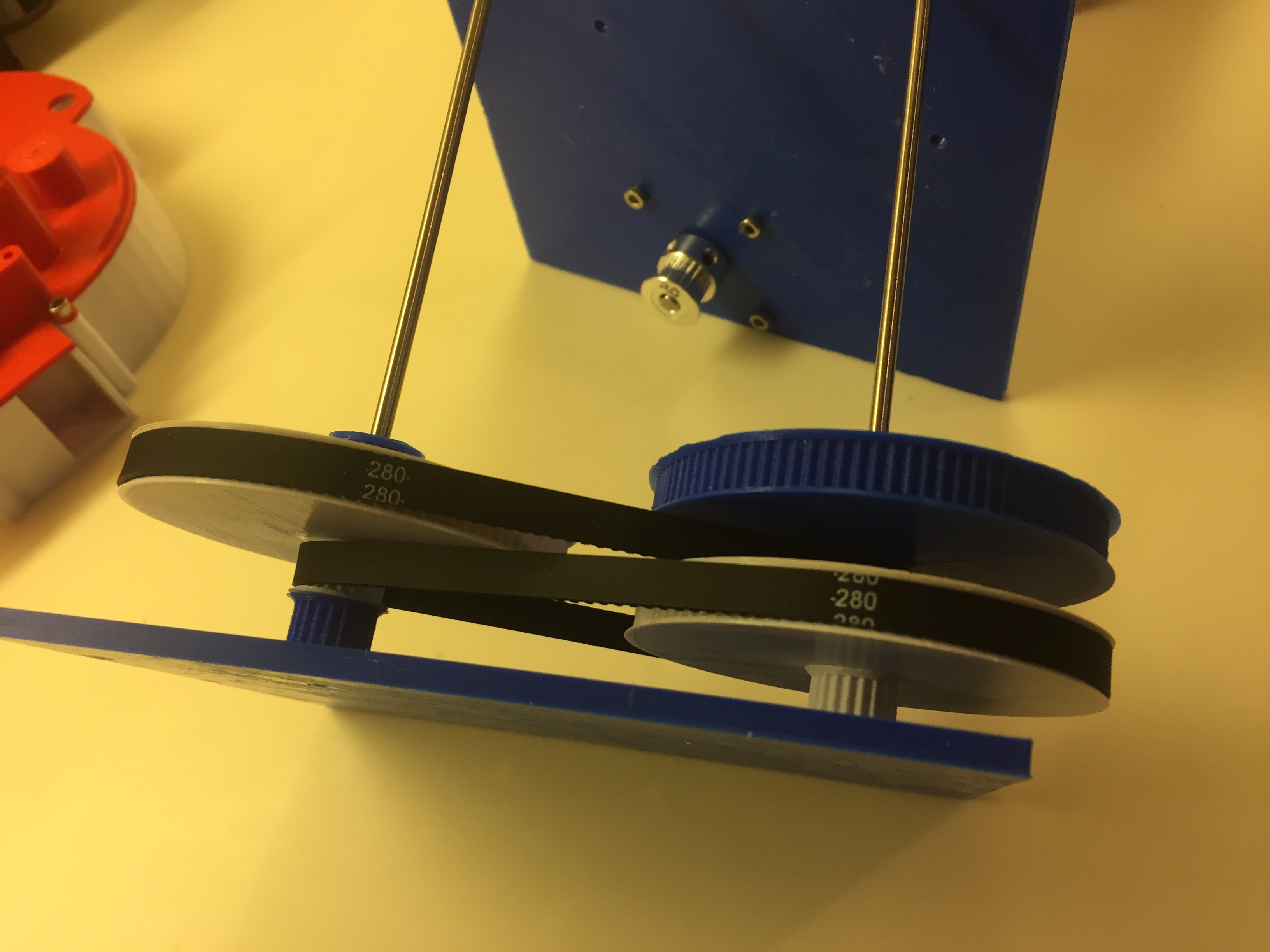
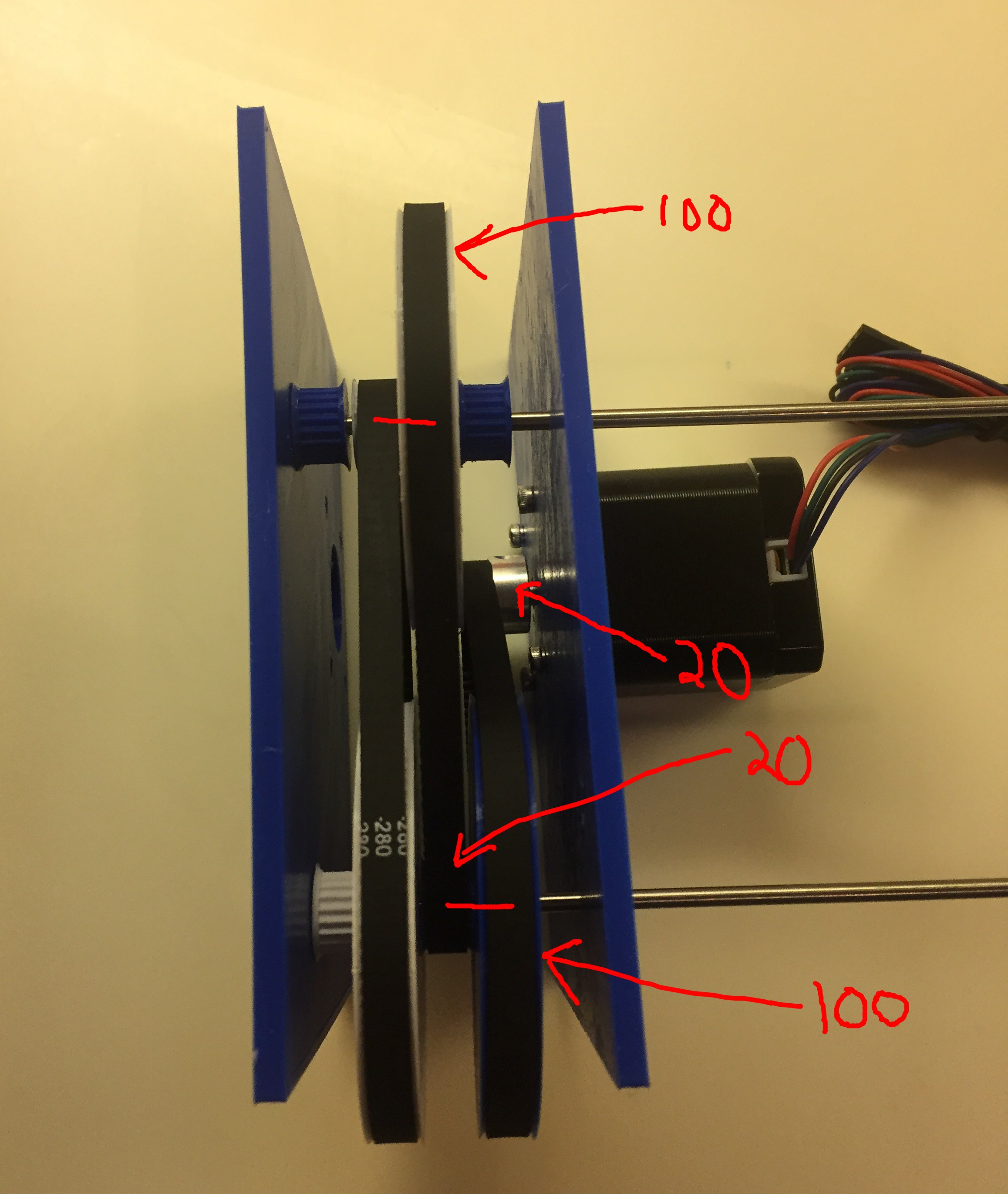
Well it just so happens that for GT2 2mm pitch if you use a 20 tooth small pulley and a 100 tooth large and space them out a nice even 75mm apart then it just to happens to fit a 280mm belt perfectly. Try it yourself here. I happen to know this because I'm played with these sizes before. I'll try to dig up the math that I used to calculate this, but the above calculator is great tool! When using that tool be sure to check out the "Teeth in Mesh" calculation. Anything less than 6 is just too small. The 20:100 combo leaves 7 in mesh which is respectable considering there won't really be much force.
So now I have a 1:5 reduction set, but we also need one large pulley for the "main" drive pulley on the telescope itself. The largest GT2 that I can print is about 300 tooth. You want your largest pulley on the telescope so you have the both the largest belt engagement but also the largest final reduction. So lets print one of those up and slap it on...


So now I have 300, it is time to work backwards a quick setup is:
Stepper
| Stage | Output | Input | Ratio : 1 | ArcS/Step | |
| 5 | 300 | 30 | 10 | 6250 | 1.0368 |
| 4 | 100 | 20 | 5 | 625 | 10.368 |
| 3 | 100 | 20 | 5 | 125 | 51.84 |
| 2 | 100 | 20 | 5 | 25 | 259.2 |
| 1 | 100 | 20 | 5 | 5 | 1296 |
| 1 | 1 | 6480 |
So I will have a whopping 5 stage reduction. It will consist of four 100 tooth + 20 tooth pulleys compound pulleys plus one 100 tooth + 30 tooth. All of which can be easily printed... Here is what it looks like so far:
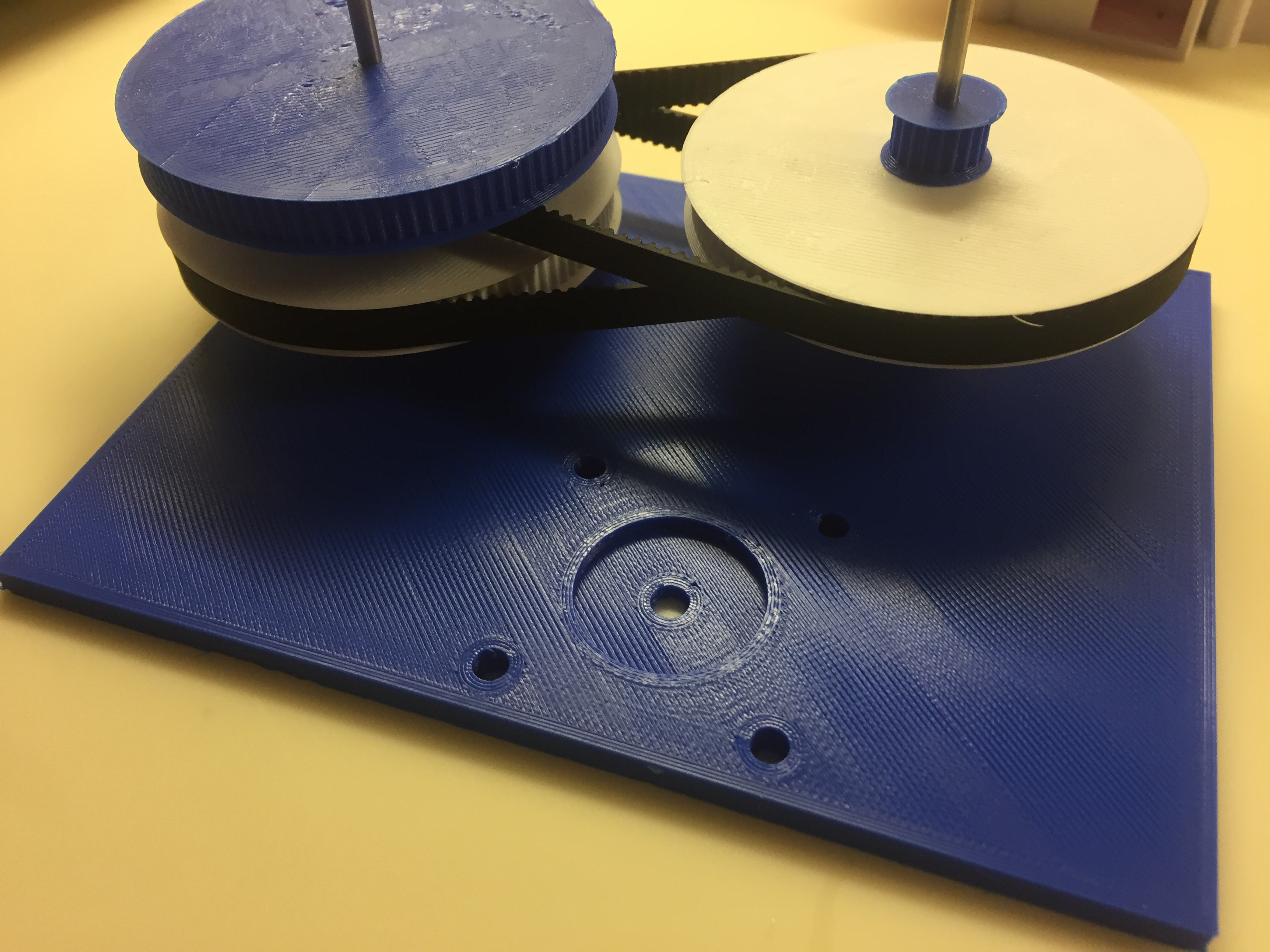
I just have to print up another two stages and I'll be all set. Then I just have to make the final connection from the final 30 tooth pulley to the big 300 tooth. For that I'm going to just make my own belt and clamp it together. Since the telescope is not going to turn in a full circle I don't have to worry about the joint.
Once I get the box finalized I'll post the STLs and the OpenScad files for the pulleys.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.