 Brandon
BrandonHey Embedded AI Enthusiasts,
We're excited to share that we just finished component placement and initial routing of our first version of the board. This one is for initial development, debugging, etc. - and actually doesn't even have a Raspberry Pi slot yet. It'll primarily be programmed by JTAG and prodded and debugged.
Anyways, here's a 3D view of it:
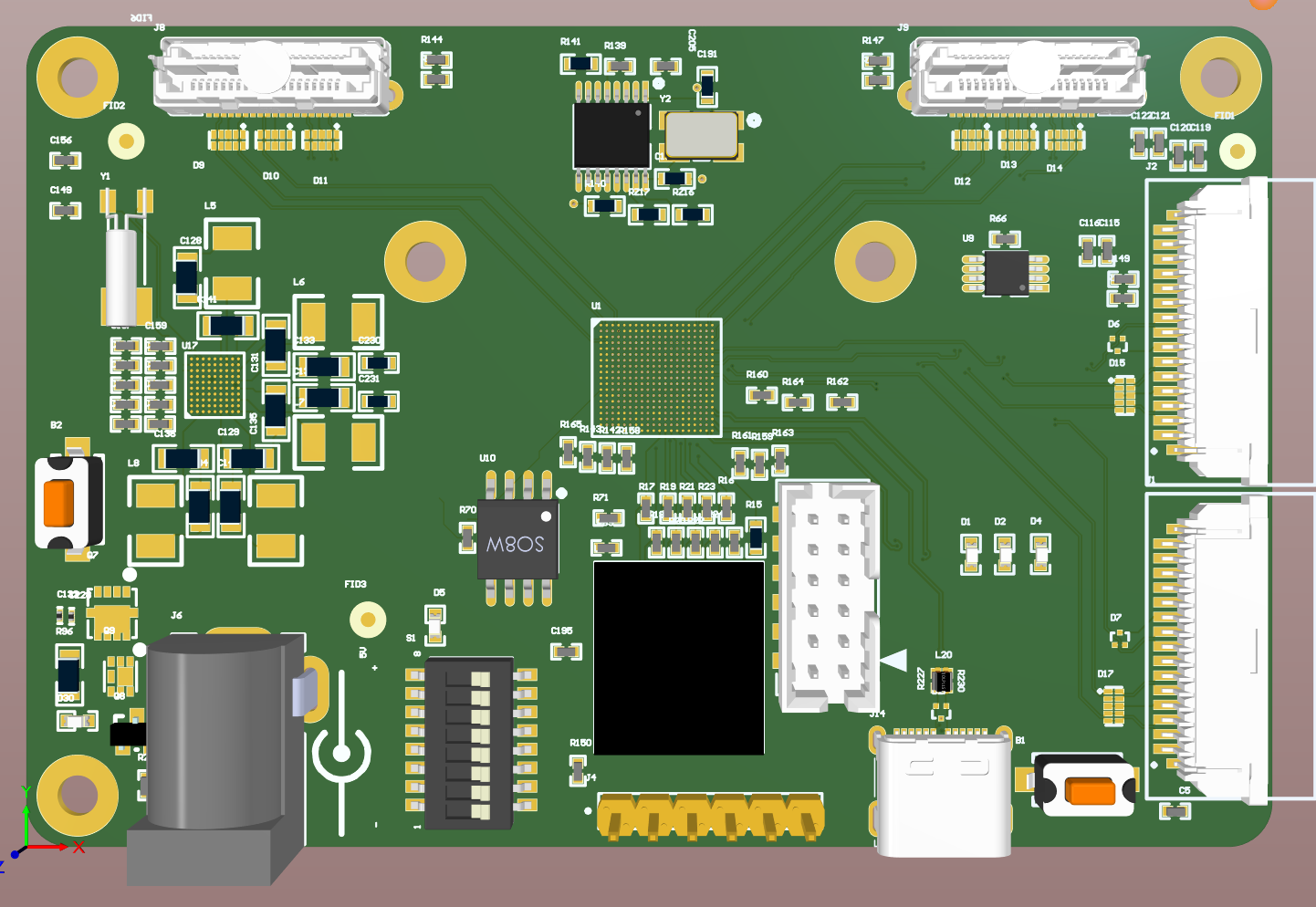
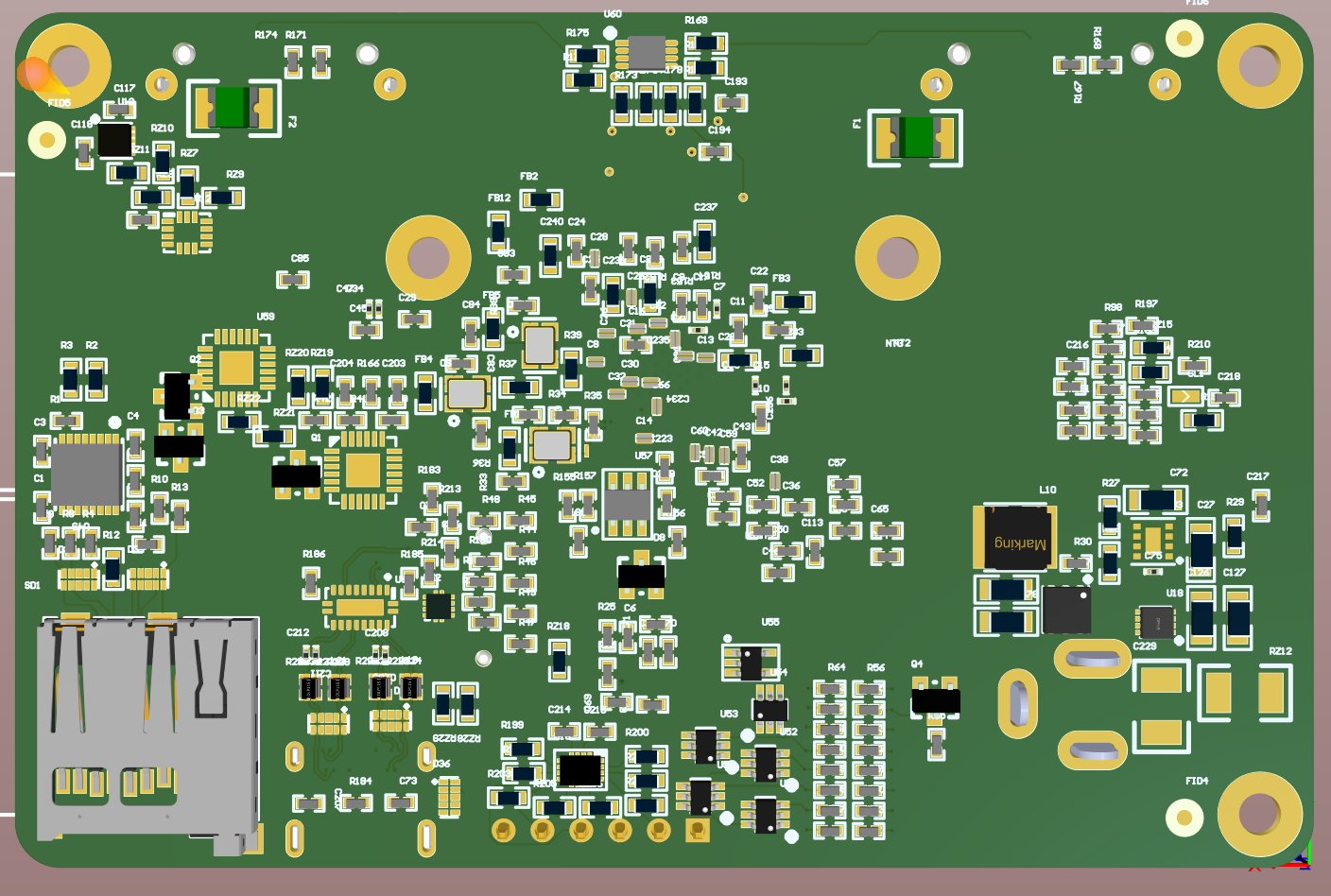
It is, however, the same size as a Raspberry Pi 3. For the later versions, we'll remove a TON of extra stuff that's on this one - so there'll be more room for the Raspberry Pi CM3B+ module.
Thoughts?
Best,
AiPi Team!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Thanks for your reply, Brandon!
I guess in stereo depth output of Intel D435 is not quite comparable to Myriad X because as I understand Intel device uses active IR stereo (so it projects a pattern and uses two cameras to determine 3D positioning of every point), while Myriad X should be able to just compare two images without any projection needed (however I could be wrong, information on those capabilities of Movidius chips is scarce and I don't have first-hand experience with them). IMO being able to work without pattern projection is crucial for reliable work outside, so I have high hopes for your development.
I'll watch your project and wish you all the best!
Val
Are you sure? yes | no
Thanks! We figured there had to be a need for this, so might as well see about releasing it.
It looks like 30FPS is pretty readily doable, yes. And yes, the 6 streams (3 stereo pairs) at 720p each is what it's spec'ed at. Beyond that we're not sure, as it may be memory access constrained (the Myriad 2 stereo depth was limited by this, so hopefully that's fixed on the X). So perhaps even though it can do 3 stereo pairs at 30FPS, maybe that doesn't mean it can do 1 stereo pair at 90FPS (because of how the fabric is stitched together, perhaps). Our suspicion is that may be the case, based on memory access speeds. But we'll see! And 30FPS is still pretty good.
We haven't actually independently gotten stereo depth up/running (as we're waiting on the boards) so we just don't know.
As for resolution and accuracy of the depth data from the Myriad X, also, unfortunately, unsure so far (but we'll keep you updated). We're hoping as good or better than that of the Intel D435 (which is pretty decent).
Thoughts?
Thanks,
Brandon
Are you sure? yes | no
I'm really interested in adding stereo-depth vision capability to RPi, but what's the practical framerate achievable with Myriad X?
In specs they mention 6 streams of dual 720p video at 30 fps IIRC, which would translate to incredible speed if just two cameras are being used, but I'm not sure it aligns with reality.
Another question - what was the resolution and accuracy of depth data produced by Myriad X in your experience?
Thanks!
Val
Are you sure? yes | no