 r57zone
r57zoneThere are 3 modes of use:
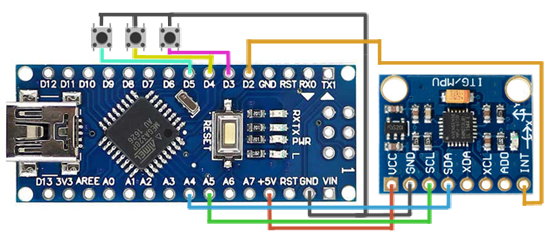
- Default - no use of the gyroscope (button 1 - digital pin 5)
- Steering wheel - emulation of the left stick by the gyro (button 2 - digital pin 4)
- FPS - mouse movement by tilting the gyro (button 3 - digital pin 3)
The centering of the axes occurs when you press the steering wheel button or FPS.
Setup
Change the COM port number in the file "X360Advance.ini", the sensitivity of the steering wheel and the rotation of the camera if necessary.
Next you need to copy the files "xinput1_3.dll" (for 32 bit games and for 64 bit copy "xinput1_3x64.dll" and rename to "xinput1_3.dll") and "X360Advance.ini" to the game folder and run the game.
Perhaps for some games you will have to rename "xinput1_3.dll" to one of the names: "xinput1_4.dll" (Windows 8 / metro apps only), "xinput1_2.dll", "xinput1_1.dll" or "xinput9_1_0.dll
What is needed?
- Arduino Nano;
- MPU 6050 GY-521 (rotation sensor);
- 3 buttons;
- prototype board;
- cable 2m miniUSB or microUSB (depending on the arduino).
- tape Velcro;
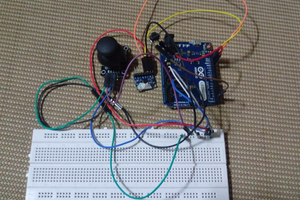
Solder the scheme. Attach to the back of the case, for example, with rubber bands.
Flash calibration sketch, put on a flat surface, get the data for calibration. Insert calibration data into the main sketch.
Firmware and libraries can be found here.

 Utkarsh Tiwari
Utkarsh Tiwari
 Gregor
Gregor
 mircemk
mircemk
 Juan M. Casillas
Juan M. Casillas
i hope i am not bothering you. i asked you for the buttons last time but someone told me how to do it. i needed some help in the following-
1.i am making a pc game controller with arduino uno. it has 1 joystick(for movement) and 1 gyroscope(for looking around) i wanted to code the gyroscope so that it replaces the other joystick which is used for looking around.please tell me how to code the gyroscope so that it does this
2. i want to use these buttons like the various buttons in a game controller so i need help in this too.
(ps-the gyroscope is a mpu 6050) thanking you in advance