 Spencer
SpencerWork on version 1 began when I was in my freshman year at community college. It was my first diy PCB. I'm proud of the work I did then but it's showing it's age and limitations.
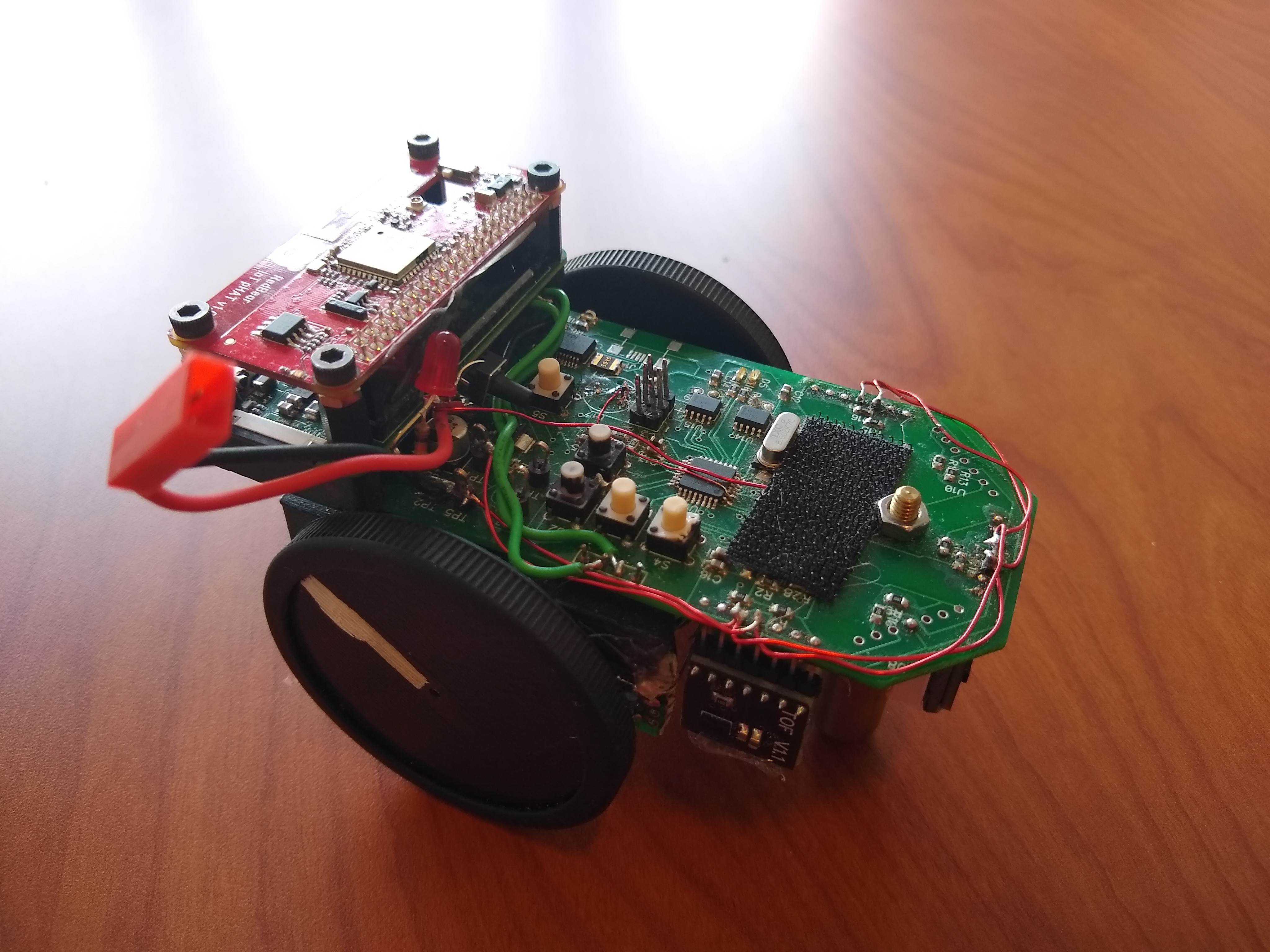
First thing you might notice is the bright magnet wire around the front of the robot. This was a bodge to fix ground lines for the vertical sensor boards. They needed fixing because I forgot to include them on the PCB. I originally used an I2C IR sensor for the distance sensing but these proved unreliable. Recently I upgrade to ST's time of flight sensor. So far they have proven far more reliable.
However the biggest issue on the robot is the encoders. Originally I used an optical sensor with a diy encoder wheel. The resolution of accuracy was just not there. However we eventual stetted for a magnetic quadrature encoder on the right wheel. Credit for this one goes to the robotics team at Montgomery College.
This worked but it still only got use 16 ticks per revolution or 1.1 cm per tick. It's workable, but better encoders is a major design goal for V2.
Originally the project did not include the raspberry pi strapped to the back of the robot. This was a late a addition. The idea here was that other team members would be able to code maze following code in python instead of C. While awkward this did work.
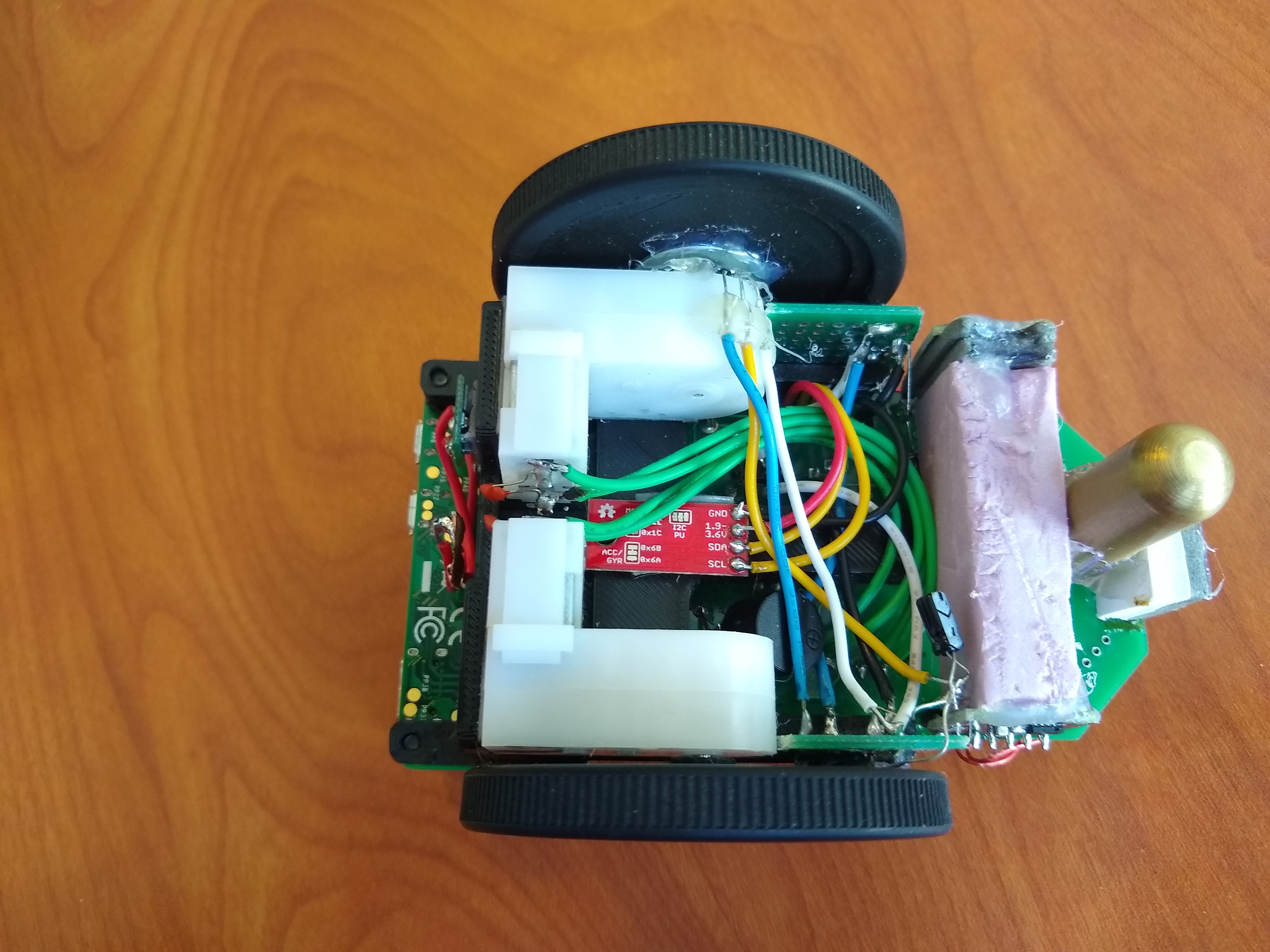
The encoders are just barely visible at the top of the image. In the middle is a gyro that was retro fit to the robot.
I do think this robot is probably capable of solving the maze. However at the same time I believe I can do a far better job with the deign the second time around.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.