 Alastair Hewitt
Alastair HewittOne feature of the Hardware Abstraction Layer that hasn't been discussed yet is the Real-Time Clock. This isn't some super low-power CMOS chip keeping track of time using a button cell, but an extension of the video timing to keep track of seconds, minutes, hours, and days. It runs as part of the block sync thread and needs all 10 watts to keep track of time!
The frame rate is either 60 or 75 Hz and this is divided by either 4 or 5 to generate a 15 Hz reference. This is used to trigger the PS/2 keyboard scan and increment the counter TIME0. This counter starts at -90 and counts up to zero, overflowing every 6 seconds. This overflow increments the TIME1 counter, which in turn counts up from -120 to zero and overflows every 12 minutes. TIME2 is then incremented and also counts for -120 to zero to overflow every 24 hours. The final TIME3 counter is then used to track the number of the days.
This may seem like an odd design, but it's based on efficient 7-bit arithmetic to keep the code compact in terms of both space and time. There are custom instructions to read these registers and return the time in the more conventional second, minute, and hour format. There is also a provision in this design to adjust TIME0 by one count every 16 counts of TIME1. This adjustment corrects the RTC to within several PPM, or losing less than 5 seconds per week.
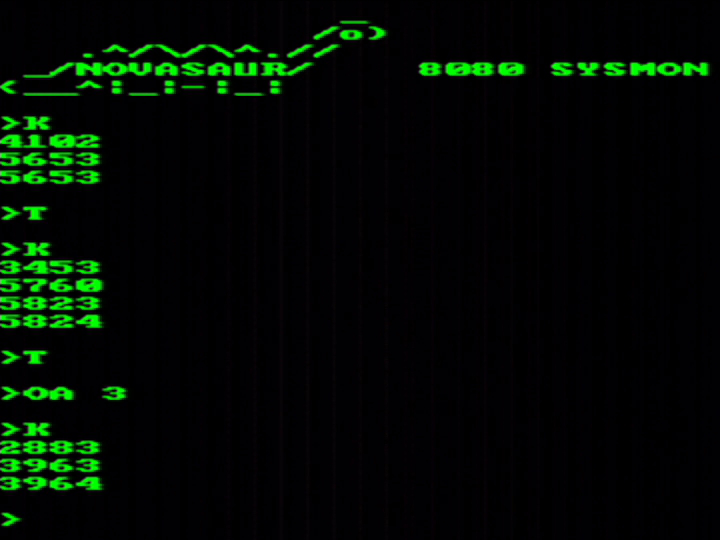
One of the first uses of the RTC is the K command in the system monitor and is used to measure the speed of the byte-code interpreter. The image above shows the command running and returning a value every 6 seconds (after the first incomplete run). The values shown are the BCD counts for a 60-instruction loop of 8080 machine code. Inserting a decimal point in the middle of this 4-digit number represents the interpreter speed in kilo-instructions per second (KIPs).
The monitor starts up with serial support turned on, so the Rx and Tx threads are running and the speed comes in around 56.5 KIPs. The T command toggles the serial mode off and this increases the speed to the maximum 58.25 KIPs, or around 1/5th of the original 2 MHz 8080 rated 290 KIPs. The final example shows everything turned on: The serial mode is toggled back on and the audio thread is started with all three melodic voices enabled. This drops the speed to 39.6 KIPs, or between 1/7th and 1/8th the speed of the original 8080.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.