 bobricius
bobriciusArticle about this project: 2d-linear-actuator-works-like-an-unrolled-stepper-motor
Article in Russian language https://habr.com/en/post/451180/
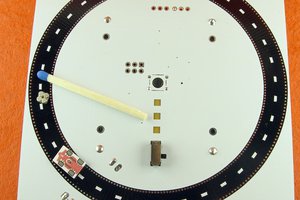
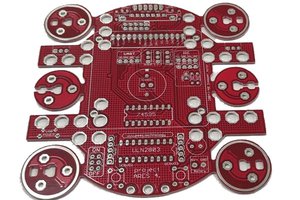
Last version is compatible with standard stepper motor diver, cnc or GRBL shield, direct replacement of X-Y stepper motors.
Latest Speed and repeatibility in one dimension is very good.
One dimension simplified version is here: ant-highway-precise-linear-circular-motor
Check My 2D version with another coil configuration
https://hackaday.io/project/154496-2d-actuator-move-micro-robot-in-xy-2d-space














 Jamie
Jamie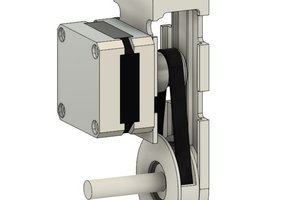
How to solve the heat problem?My pcb heat is very serious, can not work for a long time, at most can only run about 10s, because it is too hot