 Kevin Harrington
Kevin HarringtonIntroducing SmallKat!
The problem we wish to solve is that there is a need for hardware to teach dynamic walking robotics. When we say dynamic, we mean both able to sense perturbations, and has processing power and actuator speed fast enough to compensate. All existing dynamics-capable walking platforms are too expensive, and all affordable platforms are not capable of full dynamics. If students are going to learn how to make walking robots walk they need to learn using hardware. At the moment only *very* well funded universities and businesses can learn dynamics oriented robot walking.
We are leveraging 3 degrees in robotics engineering, 10 years of product design and robotics experience, and a brand new robotics IDE to provide the best possible teaching tool at the minimal possible price. We have designed a new, 3d printable cat, about the size of an adolescent kitten. We are also using the brand new BowlerStudio robotics IDE for kinematics and dynamics control. This lets students run their code on the workstation in front of them and see it controlling the SmallKat across the room. In addition to cutting edge tools, we have a comprehensive teaching package. SmallKat was used to teach robot walking dynamics at Worcester Polytechnic Institute (WPI) and those teaching materials are availible alongside the SmallKat sources. The teaching pack includes tutorials, lab procedures, lecture slides with scripts and teacher onboarding tutorials. No other walking platform has such cutting edge architecture, nor prestigious teaching materials.
What makes this system so unique is the way students write and test code. BowlerStudio lets the students control SmallKat over the rooms WiFi network. Students code runs as scripts on the PC they are using to develop, and the control commands go over WiFi. This code is quick to change and re-test, making the students experience smooth and delay free. BowlerStudio itself is designed with documentation and tutorials front and center. All documentation is visible from inside BowlerStudio, and the code examples are executable. Executable documentation makes the connection to a description of what something should do, and seeing it happen one click away. Not only is the documentation excellent, it has been teach-tested at WPI. The SmallKat platform was used to teach WPI Robotics Engineering students how to write dynamics controllers. This curriculum and teaching materials are all open-source. WPI has agreed to partner with us to promote SmallKat and help us on the distribution.
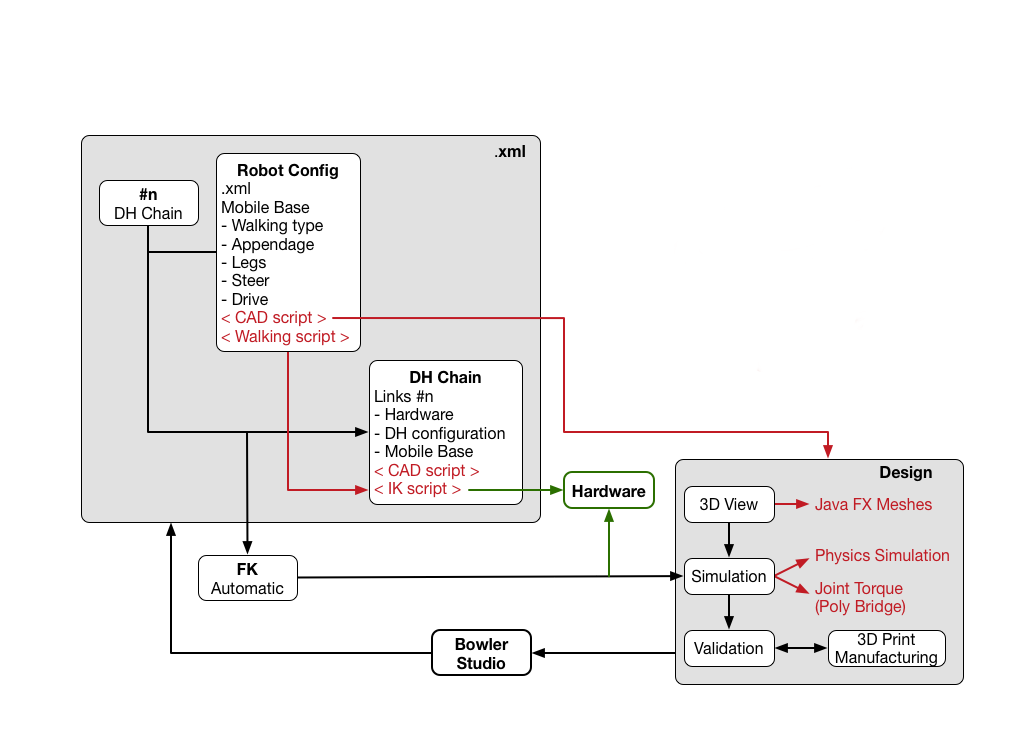
The functional structure can be broken down into two major blocks, the high level gait & kinematics computation done in bowler studio and the lower level done by the micro controller on board the robot.
Bowler Studio functional diagram:
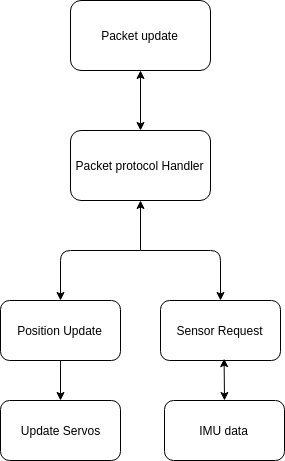
MCU Functional Diagram:
Our business model is to sell classroom kits of hardware, and individual fully assembled SmallKats. We have the backing of a top tier Robotics Engineering college and will use that backing to promote this platform to aspiring colleges and advanced high schools. The intent is to provide a lifestyle business for the developers, and to leverage resin casting for bulk orders. All SmallKats can be 3d printed, and for initial fulfilment we will provide printed parts. We will also be refining a resin cast process to streamline production and ensure consistent parts.
The process to bring SmallKat to market is incremental. In the initial stage we will lean source components and print the plastic to order. As we scale up, we will increase the number of printers dedicated to SmallKat printing and hire a member of the local Makerspace to put together kits. If we outgrow this production throughput, or if we got a large lump sum, we will hire a member at our local makerspace who used to make resin molds for Hasbro. We have already discussed feasibility and would just need to engage him to make the molds. As we spool up production we will work with WPI to expand our market reach. We have discussed plans with the WPI marketing and technology transfer offices about how WPI would help bring SmallKat to market.
Competition to SmallKat falls on one of two sides, far more expensive than our market will bear or incapable of being used as a teaching tool. In the expensive side we have the Boston Dynamics spot mini. Spot is an excellent platform but at an estimated ~$1/4 million, its well outside the budget of an teaching lab. As students learn, they break hardware, and that would be expensive hardware to break. On the other side is Nybble and the Sony Ibo. Nybble is interesting, but with 2 dof legs, it cant even actuate enough to turn without skidding the feet. Since 3dof legs are necessary for stable walking, Nybble isn't suitable for teaching dynamics. The sony Ibo is a statically stable device only and while it can right itself, its actuators are not fast enough for dynamic compensation.
There are over 80 undergraduate programs in the us : https://robotics.nasa.gov/students/robo_u.php and hundreds more worldwide. We estimate teaching labs would repurchase new hardware every 4 years (on average). With that cycle time we would need 12 customers for continuous break-even.
Here is Grace the SmallKat!
The simple electronics platform is a single ESP32, 16 servos, 3 switch mode BEC's and a BNO055 IMU. This platform is easiest to source assemble using of OTS parts plus printed pieces. This platform streams sensor data up, and servo positions down, using the WiFi built into the ESP32. This configuration is easy to develop for because the code kinematics/walking gait code runs on a nearby PC. Kinematics and walking gait/body controllers can be swapped out on-the-fly without restarting SmallKats controller making development fast. Once algorithms are finalized and published to Git, they can be loaded by the second configuration and run in a tight real-time loop with the hardware. A downside to this configuration is that it is only as stable as your WiFi signal in the room.
Here is a video of the SmallKat in slo-mo
Here is a video demonstrating the dynamics loop. The IMU produces a gravity vector that is then used to compute if the SmallKat is tipping over. To the degree that it is tipped off its axis, the dynamics controller applies a counter Coriolis force by spinning the head and tail counter to the tipping direction.