 Daren Schwenke
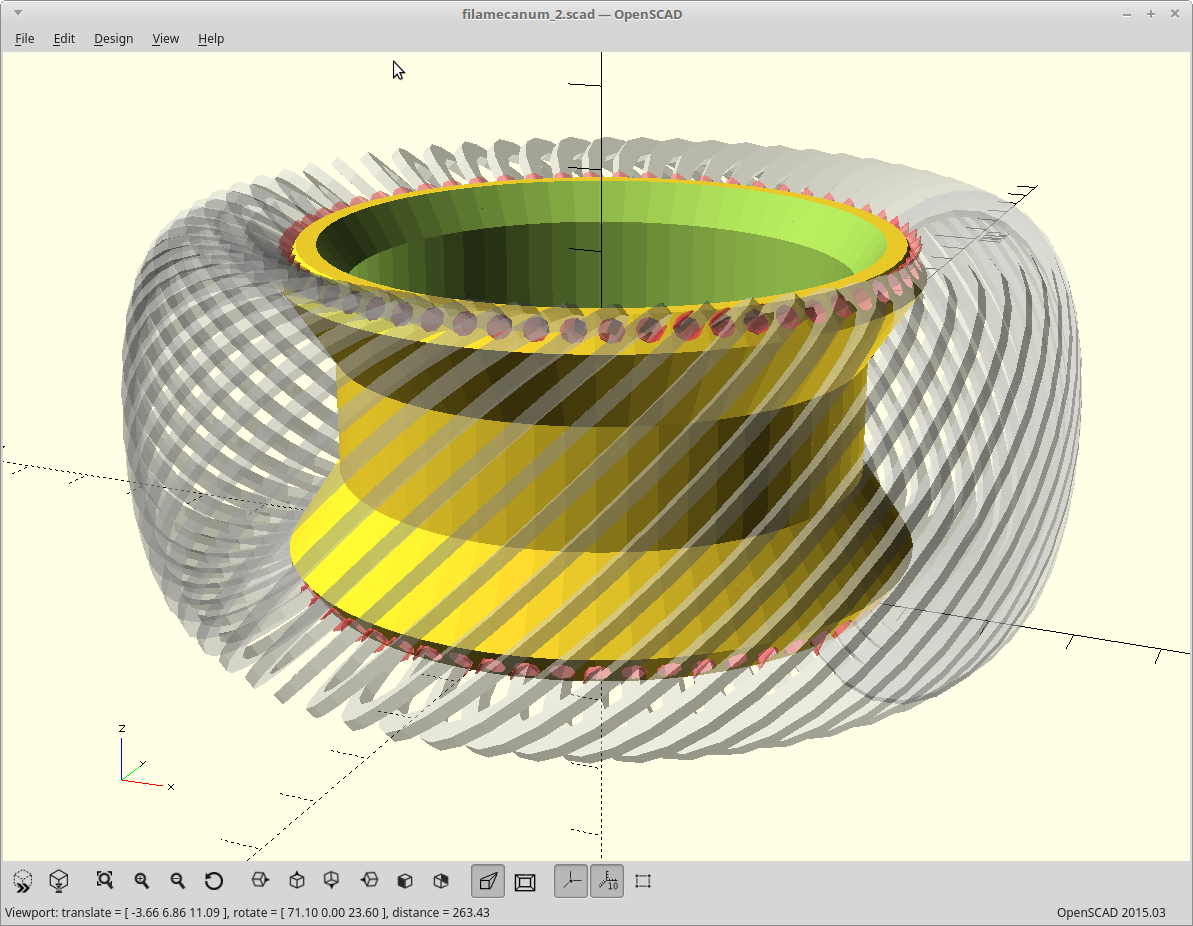
Daren SchwenkeI had another idea a whole 48 hours ago, and that became the #FilaMecanum project. Basically that project is a robotics mecanum type wheel, but instead of using rollers it uses filament. It should also work better than the original wheels on soft/uneven surfaces, and is cheap and 3D printable. I didn't have a defined purpose for that project either. :)
So I just made a version of that which will fit some motors I have, and I'm going to make a version of this transmission to power it.
The motors are pretty beefy with a 100w continuous rating, but run at a completely unusable rpm range for robotics of 3k rpm. This will make them usable.

I'm now going to take the time to generate the split planet version in OpenSCAD first though, as it has some definite advantages for this. The most important one being that if I can use a half-height sun gear, then I can put two bearings on the shaft and support the output ring gear/the wheel itself that way. This is going to be fun. :)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.