Today I was a happy man since I finally received the very long m3x50 screws and the 6 mm balls for the 3D printed ball bearings.

The upper part will have one metal axis, the lower part that drives the cogs will actually be 2 small axis endings that will get pressured in place by the midsection. I did had doubt this part would function well but now that I have the midsection assembled I am convinced that it will work.
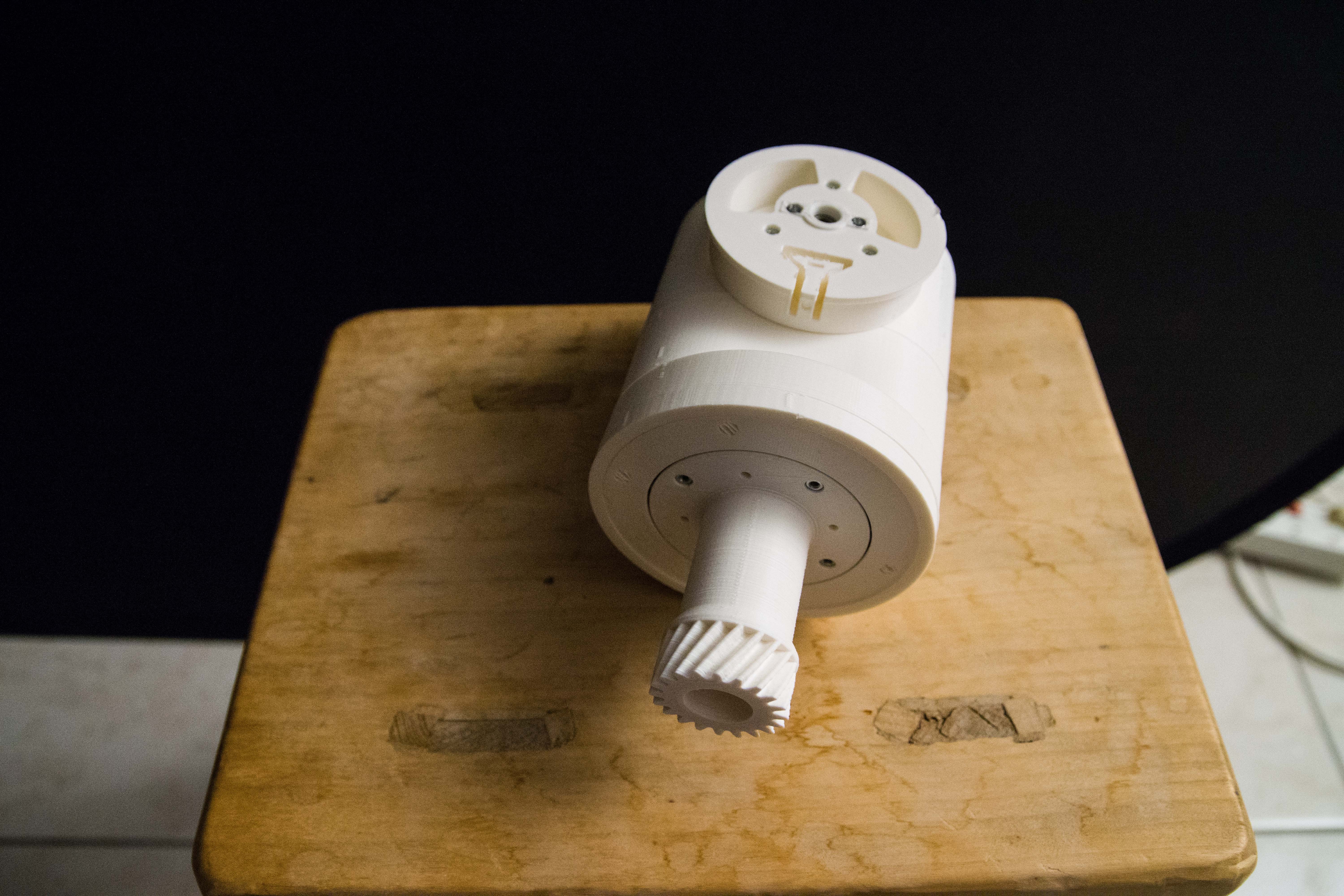
(Note: This part has been photographed upside down to show the cogs)

Detail of Art4TransmissionColumn assembled with the 6mm balls that gets inserted through the hole (left side on the image). Once this part is inserted into Art3Body, the hole gets covered. However I put a piece of paper to block the entrance because I don't want the balls to drop when I disassemble.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Its taking shape!
Looking at your post I realized that I forgot to upload the Art4 ball-locking plug. I'll upload it ASAP :)
Are you sure? yes | no
It is actually very rewarding to see it all starts to fit together and have it in your hands.
Are you sure? yes | no
I just added the Art4BearingPlug file into GitHub repository :)
Are you sure? yes | no