Software used in the project is the famous OpenPnP software for pick and place macines: http://openpnp.org/
0%
0%
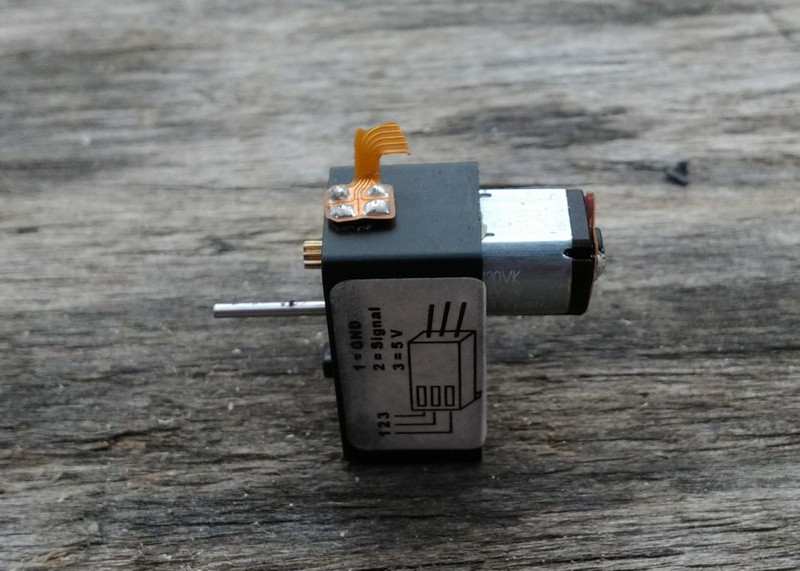
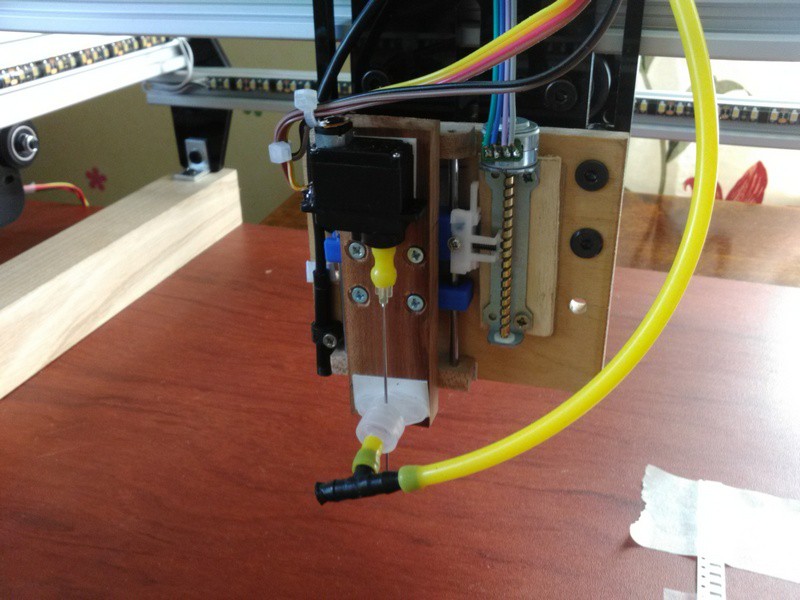
Details of pick and place machine build.
Just want to share the experience of building pick and place machine.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests








 Martin Lindskog
Martin Lindskog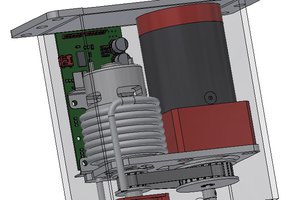
 patchartrand
patchartrand
 Mark Howe
Mark Howe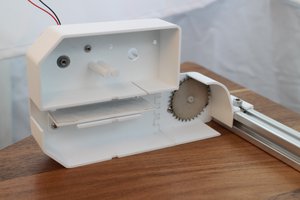
 ottoragam
ottoragam
Does the SKR board work well with OpenPNP?