 Tim Wilkinson
Tim WilkinsonI've just uploaded a revised version of the joint design. This comes after a fair bit of tinkering over the last few months. Partly I've just been tightening up the tolerances of various parts, but mostly I've been experimenting with keeping the cycloidal gears running more smoothly (so less friction) and more reliably.
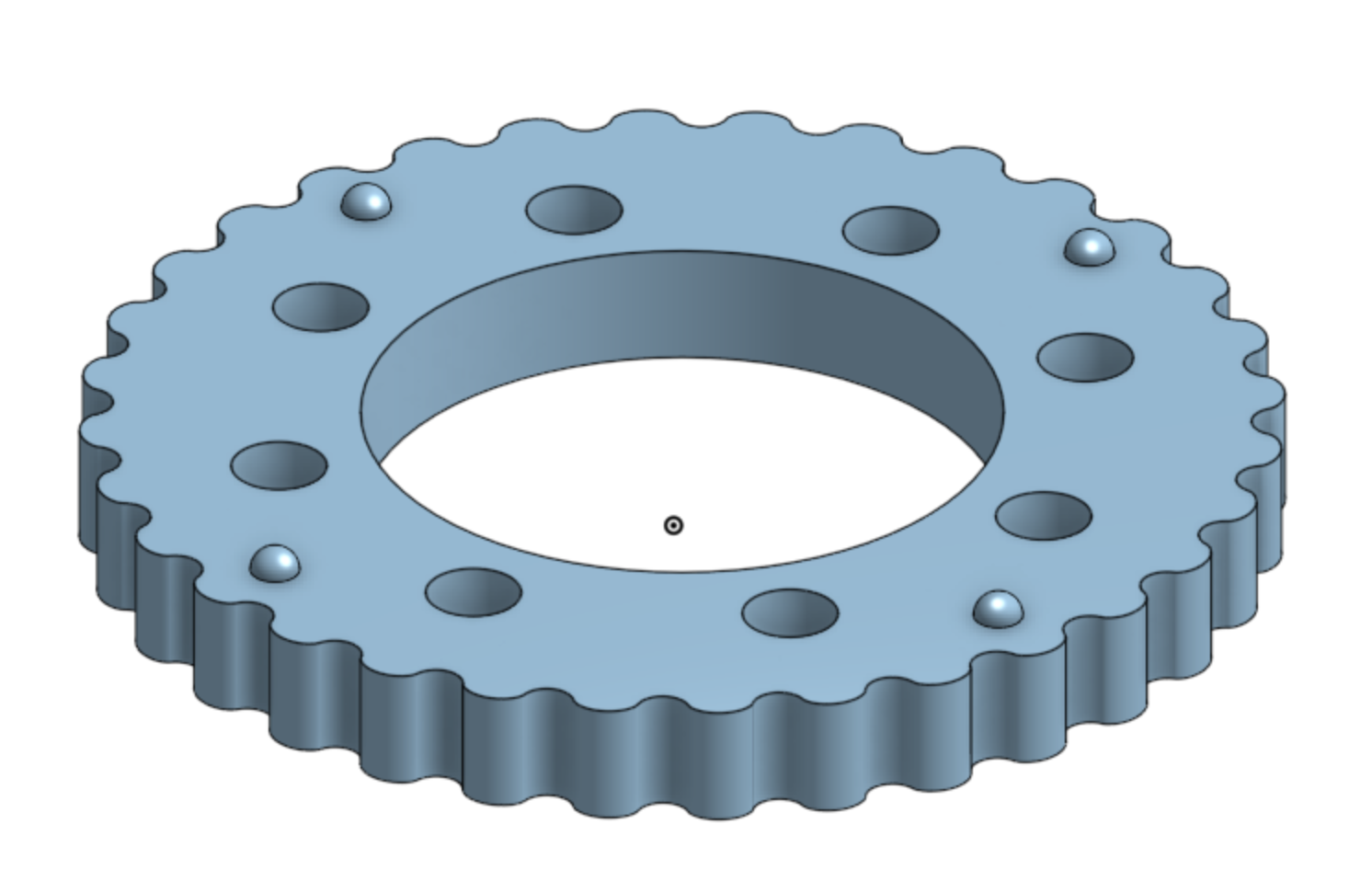
The biggest change is in the cycloidal disks themselves. In the picture above you should see an extra 4 "bumps" added to the top of the gear. These replace the nylon washers used in the previous design and help keep the disks parallel while dramatically decrease the drives internal friction. How well they wear only time will tell but so far everything seems better!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.