 Lex Kravitz
Lex KravitzTo control the stepper for this project we are using the TB6612 driver with a breakout board from Adafruit. This breakout requires more wires than some other stepper drivers but it is simple to use and has some features that make this a good choice for this project.
Today I did the "Hello World" equivalent and set this chip up to turn a stepper, following the Adafruit tutorial. I'm using a 5V stepper from Adafruit which is convenient because we can power it directly from the 5V pin of the Uno, instead of needing a separate 12V power supply.
I wired it up like the tutorial (photos below) and flashed the following code onto an Arduino Uno clone that I had lying around. The stepper turns both ways, hello world!
#include <Stepper.h>
// change this to the number of steps on your motor
#define STEPS 200
// create an instance of the stepper class, specifying the number of steps of the
// motor and the pins it's attached to
Stepper stepper(STEPS, 4, 5, 6, 7);
void setup() {
stepper.setSpeed(30); // set the speed of the motor to 30 RPMs
}
void loop() {
stepper.step(100); // Move clockwise
delay (1000); // Wait a second
stepper.step(-100); //Move counter-clockwise
delay (1000); // Wait a second
}
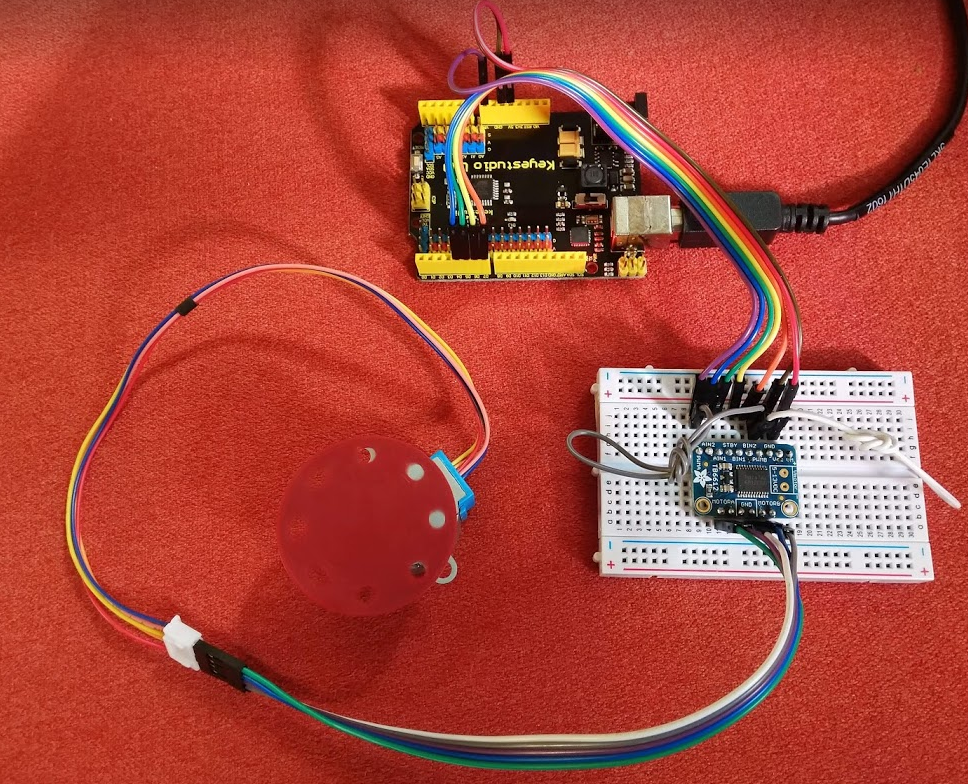
Photos of the entire setup (I attached the red disk to the stepper to see it turn more easily)
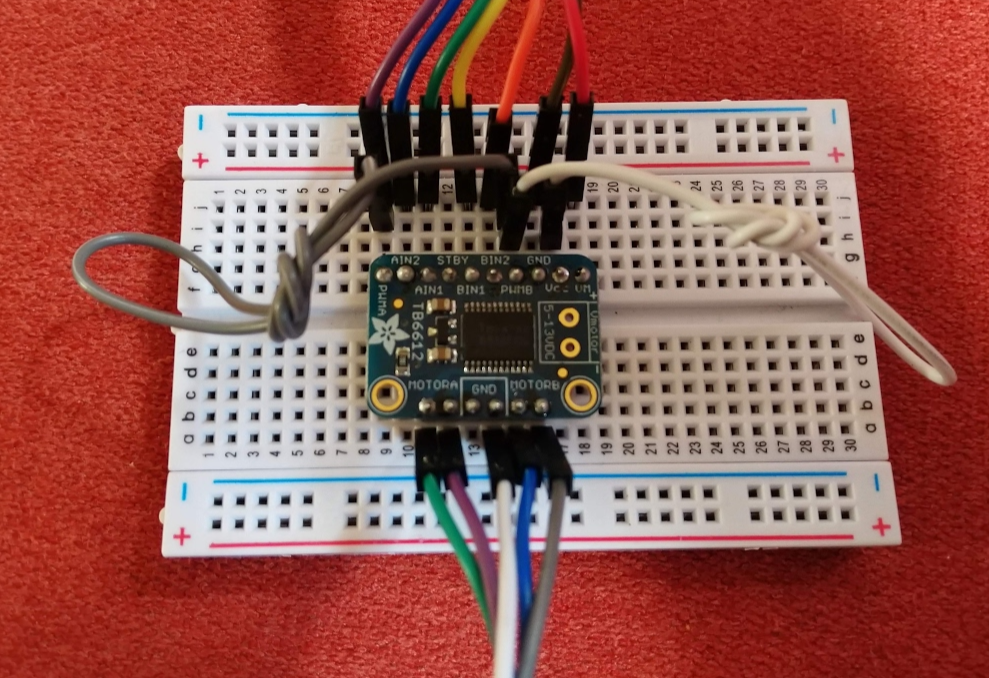
Close-up of the TB6612 connections:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.