 Edgar Bolivar
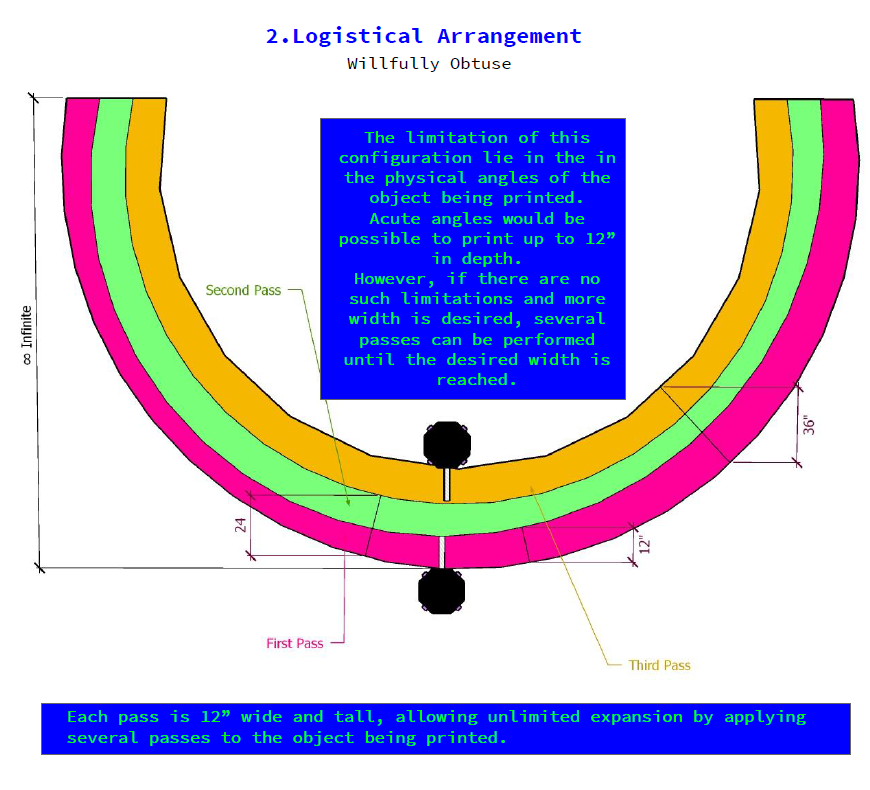
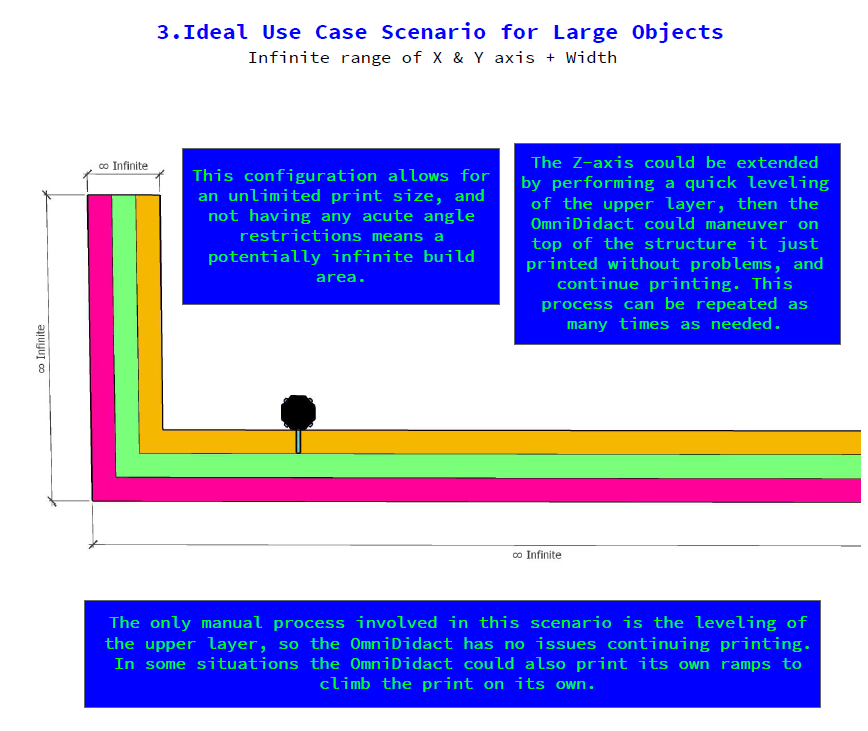
Edgar BolivarThe Omniprinter is designed for large scale 3D printing, it supports conventional extrudeable materials (plastics, ceramics, clay, concrete & pastes) this morphology allows for a virtually unlimited range in the X-axis, while the Y-axis has some mechanical limiting factors but they can be overcome by process logistics.
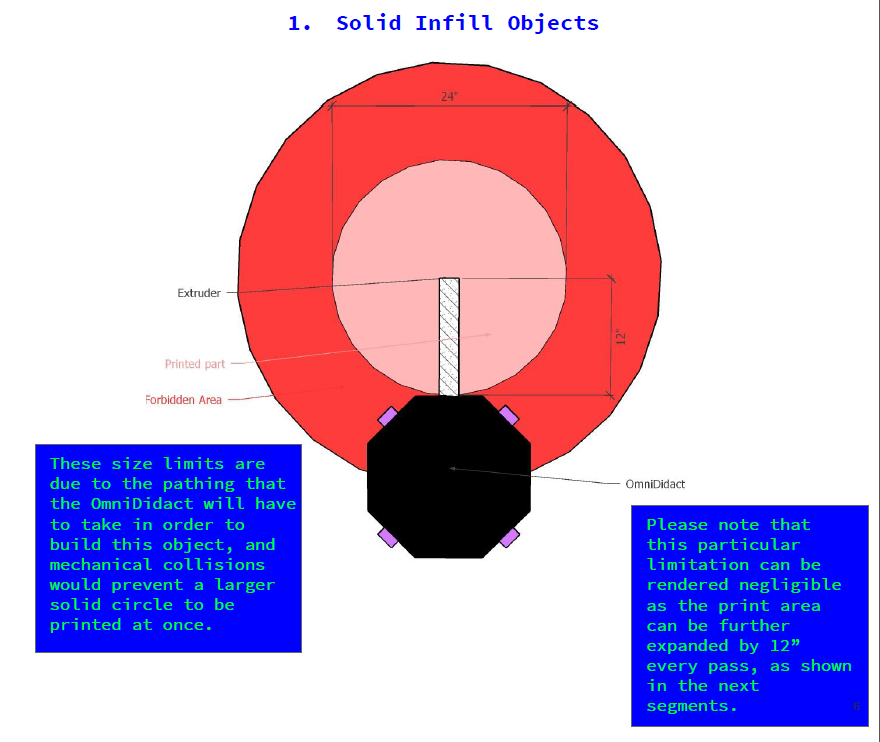
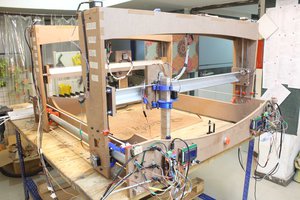
The printing depth is determined by the length of the extruder rail, in this instance is 12" which is expandable up to a certain point. The prototype released here has a height of 12", boasts 100mm omnidirectional wheels and is married with a paste extruder.
One of the problems we are currently facing is errors due to inertia and skewed center of gravity. The wheels used in this experiment do not work by friction like conventional wheels, instead they use a slippage method, kind of like a car drifting. Thanks to this, the platform can move in any direction at any time and instantly.
To resolve this problem we are currently testing several options for sensor arrays, they are designed to optimize for resolution and for area coverage. These sensors will track the platform's position and the software compensates to bring the platform back to the desired position, these changes occur almost instantly so aberrations found in the printed object are minimum.
Another aspect we are currently researching is the capability to swarm 3D printing. By using several robots at the same time, we can reduce printing times exponentially and become more efficient at building, by having the robots work in tandem and collaboratively.
 We have created a Discord server to give some permanency and organization to the discussions and ideas from whoever that wishes to participate.
We have created a Discord server to give some permanency and organization to the discussions and ideas from whoever that wishes to participate.This is just the beginning and only part of an Open Source project by Petricor, any contributions and developments made by the community will remain part and property of the community.
The project spans incredibly huge areas of research, in the context of building a home and potentially entire cities with this type of technology, many aspects have to be taken into consideration: Civil Engineering, Architecture, Material Design, are only a few not to mention Robotics and Process Control. Petricor plans on archiving and organizing this information as it is discovered by the community.
 Nishant Agarwal
Nishant Agarwal
 jon.knutton
jon.knutton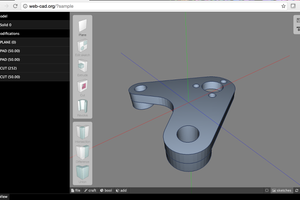
 Val Erastov
Val Erastov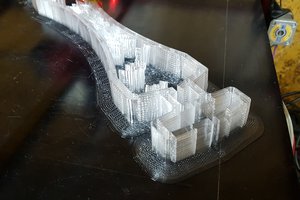
 Michaël Memeteau
Michaël Memeteau