 Josh Geating
Josh GeatingTorque sensing:
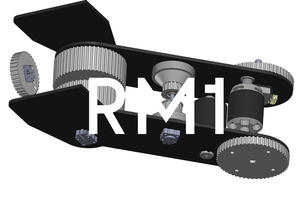
Joint torque is accomplished by measuring differential belt tension. The output should be fairly linear and high bandwidth. Initial tests with a 3d printed testbed showed a lot of promise for this. Idler bearings are arranged to create a small angle (a few degrees) in the belt, such that tension exerts a side load on a central idler bearings. These bearings are attached to a cantilevered load cell, which measures force proportional to belt tension, which is in turn proportional to joint torque. This makes for a low cost solution, as the sensing element only costs $10 (See Seedstudio or Robotshop), which is easily replaceable even if it breaks.
Currently, using a Robotshop 2ch load cell amplifier, which outputs analog directly to an Arduino. This lets the Arduino drive the bandwidth limitations. Using an Arduino Due, you can get reliable 12 bit analog resolution, and >1 kHz bandwidth.
Actuation:
J1-4 Drivetrain: After much searching, I've ended on using a planetary gearbox, which in turn drives a belt stage. Chinese gearboxes are affordable and relatively low backlash (<25 arcmin). Going to a final belt stage accomplishes two things. First, it divides the backlash by the gear ratio, which are ~4-6:1 for the current design. Secondly, it makes the final stage an engineerable design. Gearboxes at robot level torques (hundreds of Nm) are very hard to come by. However, timing belts and pulleys are ubiquitous, ~zero backlash, and very high strength, as one can see when taking apart most industrial arms.
Manufacturing:
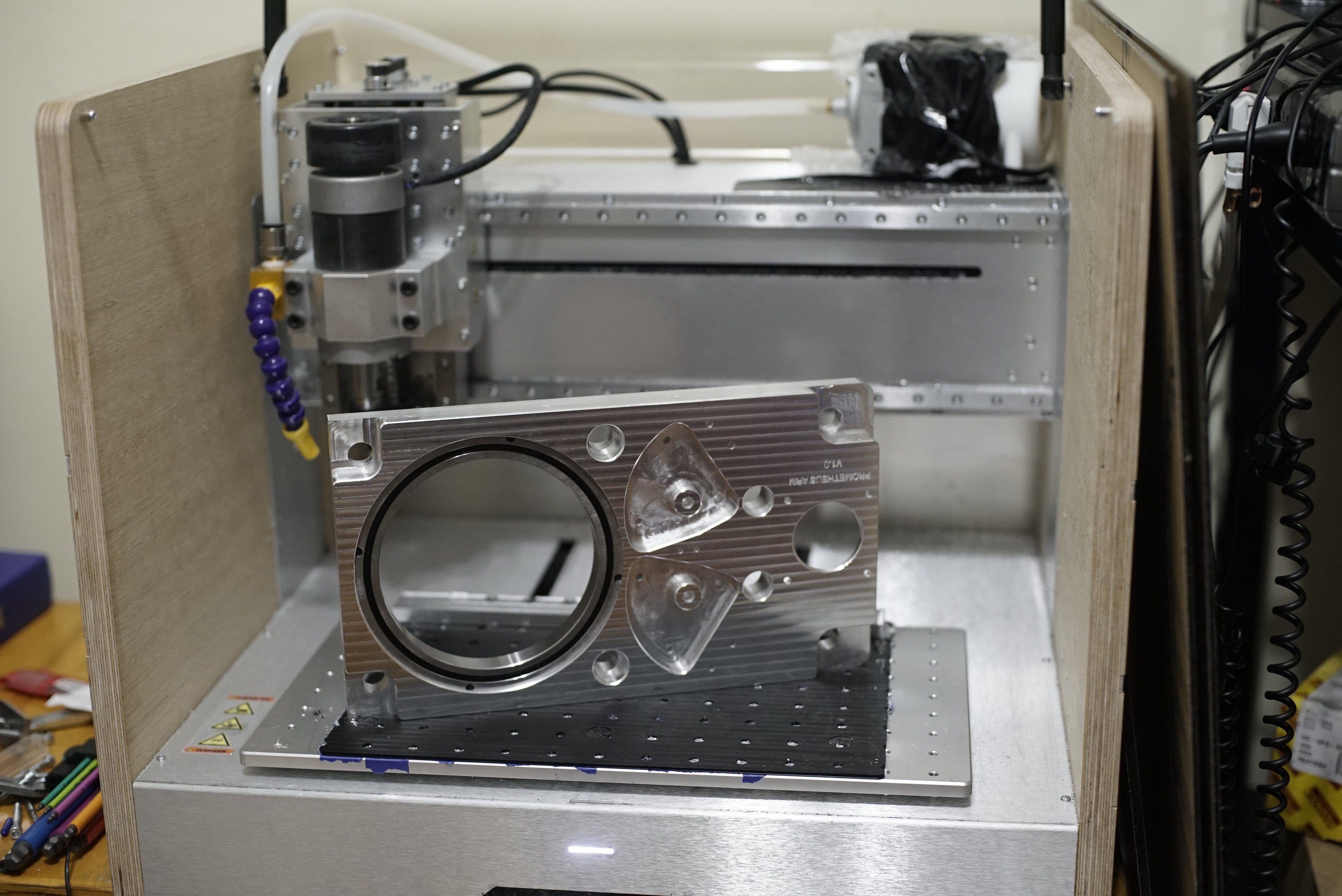
I believe the maker community is ready to move beyond tunnel vision on plastic 3d printers. Though convenient, they are a huge barrier to making high strength, high stiffness, high precision components. Desktop mills are beginning to become ubiquitous, and through attention to detail, can be used to mill 2.5D parts precisely and reliably. This arm heavily leverages desktop CNC mill fabrication for most of its high strength components. 3D printing is only used for non-structural components, or as a last resort for components in the load path.
The tubular structure will be CNC laser cut. Companies like Precision Tube Laser are making high strength to weight components realizable, affordable, and scalable for production. Structural tubes would otherwise require very large machines to fabricate, or sacrifice stiffness if made from multiple components. Both arm tubes are currently 6061.
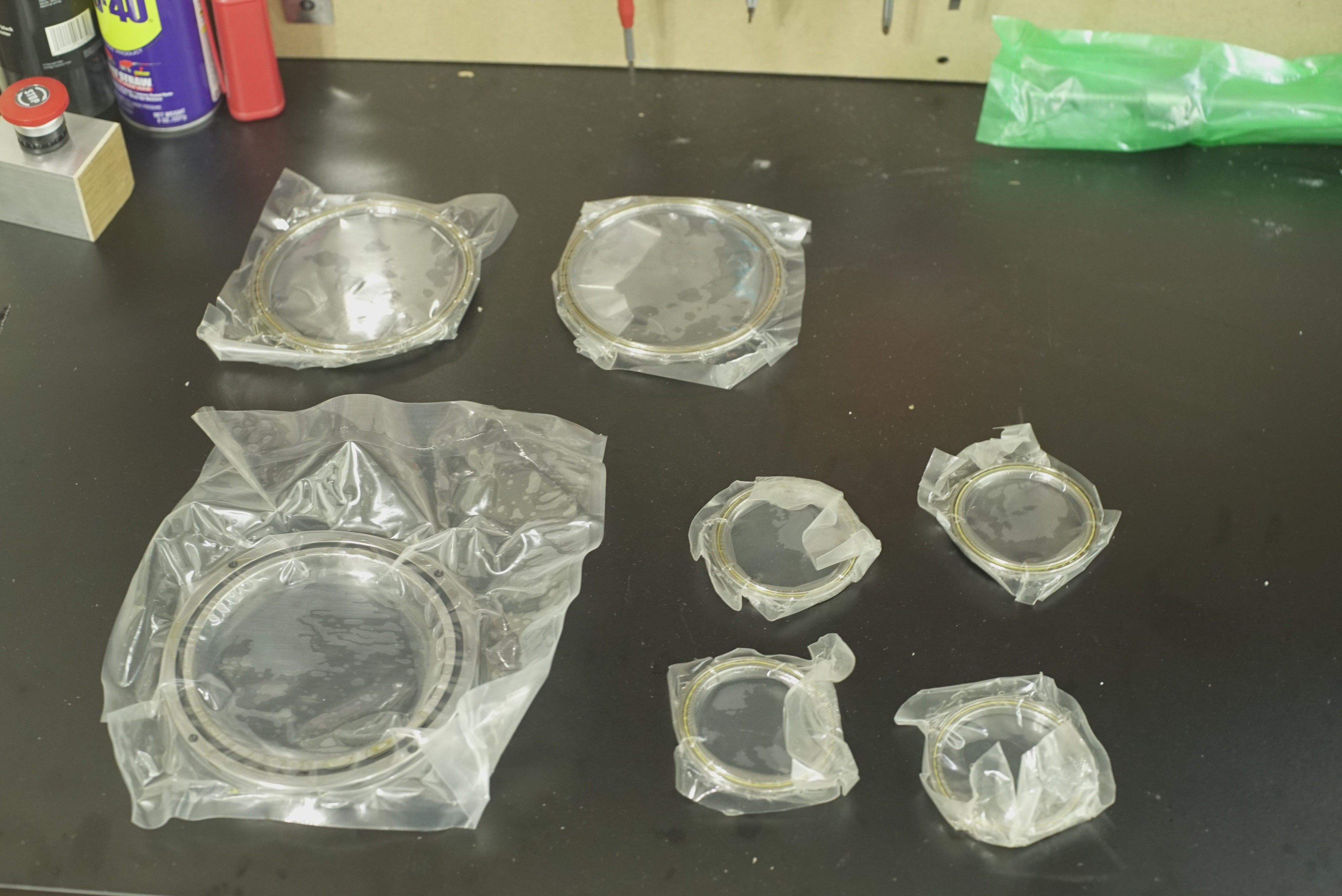
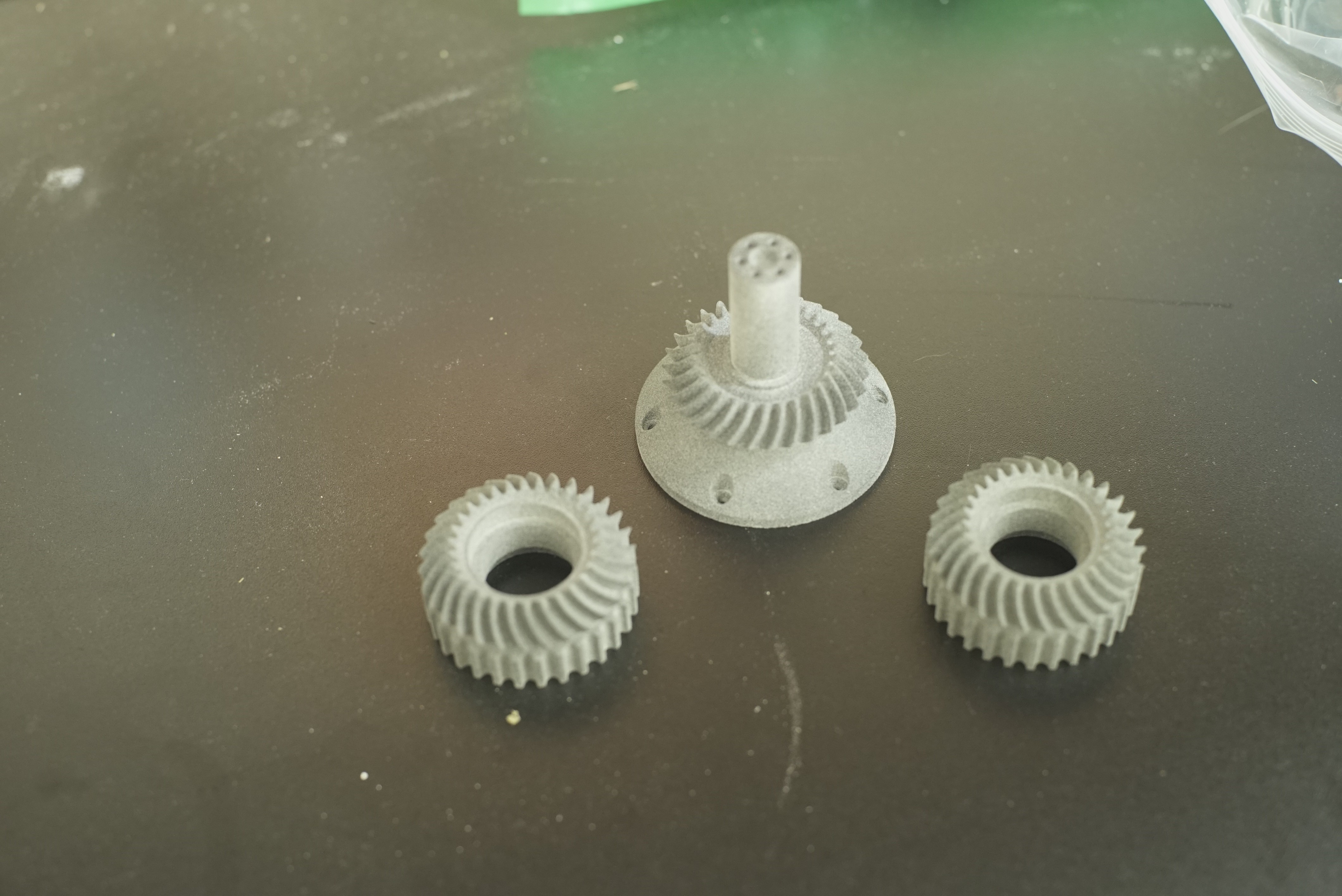
Some photos from the build:

 David Shelenev
David Shelenev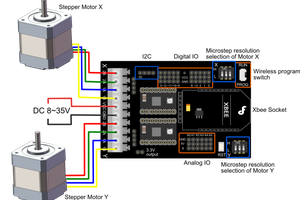
 MakersBox
MakersBox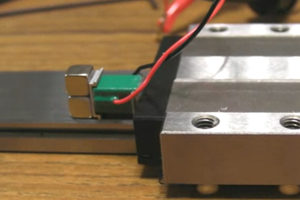
 Edwin Hwu
Edwin Hwu
 Cameron
Cameron