 Cirmall
CirmallOverview: Based on the observation of the behavior patterns of insects when they walk normally and when they break their feet, we made an imitation to them on the reequipped hexapod robot platform through designing special structure and using algorithms, and we realized to make multi-legged robots move under control when their legs are broken, which can be used as the solution for earthquake searching and rescuing, earth exploring, and exploring on outer planets.
When I watched Raffaello D'Andrea’ speech on TED, I was shocked. A multi-rotor UAV can stay in a relatively stable status in the air and make controllable flying action even it only uses one airscrew. And this led me, who was obsessed with making quad-rotor UAV, to see what was probably the highest level in the industry at that time, and buried a foreshadowing for this project. Originally, it can be traced back to a small-scale speech on TED by Raffaello in 2013. In that speech, he displayed the technique that a multi-rotor UAV whose two airscrew blades were cut can still fly under control, this was the primary form of his single-blade UAV. Following this idea, when I was observing the behavior of insect in biology class, the inspiration of this project came to me, that is the multi-legged robot which can still move under control even if its several appendages were broken. My engineering project is established on the assumption that “insects can still move following their own will even if their several appendages lost”, this is the function that I want to realize through the design of engineering bionics. In order to verify the assumption that I made, I captured some living insects to conduct an experiment.

(The picture is the screenshot of the experiment video which was processed by PhotoZoom Pro, Phylum arthropoda, class insecta, blattaria, cockroach) Making use of the phototaxis of insects, I made a light beam from LED light resource with lens system in the basement to attract insects to crawl along the line of the light beam.
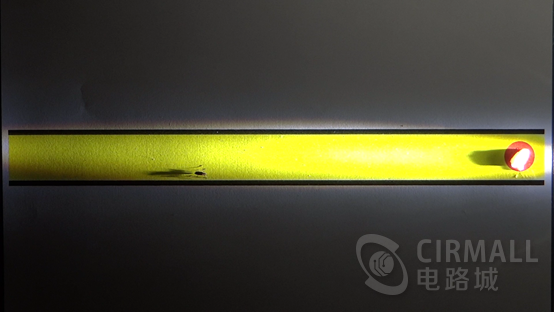
I recorded the crawling process of insects and edited it into a video per second and then projected it on a white board with a projector, traced the points and connected the line, thus I got the moving route of insects.

It turned out that the insect can still crawl basically following a straight line along the light beam even if three of its appendages have been cut (the extreme case assumed for the project, two rear legs and a mid leg of the insect have been cut here). Then it is believed that the assumption of “insects can still move following their own will even if several of their appendages were lost” which is made by me is basically correct.
Based on the idea to protect the ecological balance in some ecological environment, I followed the principle of bioexperiment and put the dying insect beside the spider we captured, which made the spider have a good dinner.
The final purpose is:
Through the transformation of hexapod robot platform, which made it have the detachable and restorable quick-release mechanical legs, connecting the connected mechanical legs and the body through actuating device and clamping transmission line.
Through the observation of the moving model when insects with specific aim move normally or when they lost some of their feet, I made an imitation to it on the hexapod robot platform using algorithm.
In the imitated dangerous environment, one or three mechanical legs were taken down to make a test, the multi-legged robot can still move under control no matter which three legs were taken down.
Here I’d like to emphatically explain the action control:
Every leg of hexapod robot is its action unit, through changing the action status of the six legs, we can realize to make hexapod robots act.
As for the action control, I referred to the walking style of insects that I observed, which also provides an inspiration and an experimental platform for bionics...
Read more »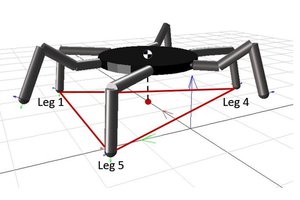
 Nyeli Kratz
Nyeli Kratz
 Nikhil M Jeby
Nikhil M Jeby
 Aditya
Aditya