 Dongil Choi
Dongil Choi- First Run using MJ-VESC v0.1
- Load Test
- Comparison 40:1 (V2) and 27:1 (V1)
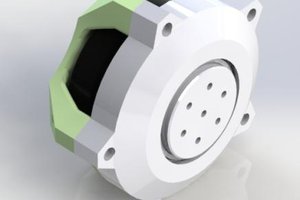
3d printed 40:1 Cycloid gear actuator module using Tarot 4008 (330kv) motor and MJ-VESC Circular Type Motor Controller Inside.
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
- First Run using MJ-VESC v0.1
- Load Test
- Comparison 40:1 (V2) and 27:1 (V1)
|
x-zip-compressed - 44.67 MB - 09/20/2019 at 07:23 |
|
Love this gear idea. Can I embed this project in my content based blog that hosted on WordPress? You can see my gearsireview blog.
Awesome project and thanks for sharing the files! I am trying to 3D print the gearbox but run into issues with the rotors being too tight with the housing and not rotating freely. I wonder if ran into a similar issue and if so how did you solve it?
This is really great work ! It would be very helpful if you could offer STEP files of all 3D.

Hey, I would like to build your project... how can I follow your design?
I would otherwise make a remix and use the O Drive, but if possible, I would like to follow your design! :)

Thank you for your interest. I have uploaded 3D printing files, and you can follow the YouTube video for the assembly process. Regarding motor drivers, we're developing a small circular type driver, which would be good to refer to https://hackaday.io/project/167660-mj-vesc-circular-type-ver-03. My motor driver is based on VESC firmware. About that you can check this paper (https://ieeexplore.ieee.org/document/8957033). I couldn't upload the progress often, but I made 0.5version recently and I'm testing it. I think we'll get the results soon.
I really like the idea of your motor driver, and would like to make one, once the instructions are available!!
Thanks a lot for sharing!! :)

Hi,
Your design is impresive! Can the actuators be backdriven?
It is possible to calculate force sensing? (for example when a robot touches the ground after making a jump)

 Shashank Shekhar
Shashank Shekhar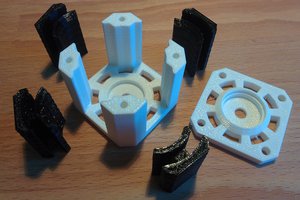

 Colby Johnson
Colby Johnson
Wonderful work! Were you able to calculate drive efficiency and/or backdrive load?