 Lucas Gerez
Lucas GerezThe motorized exoskeleton glove consists of three different main parts:
- Control Unit
- Robotic Glove
- Smartphone Interface App

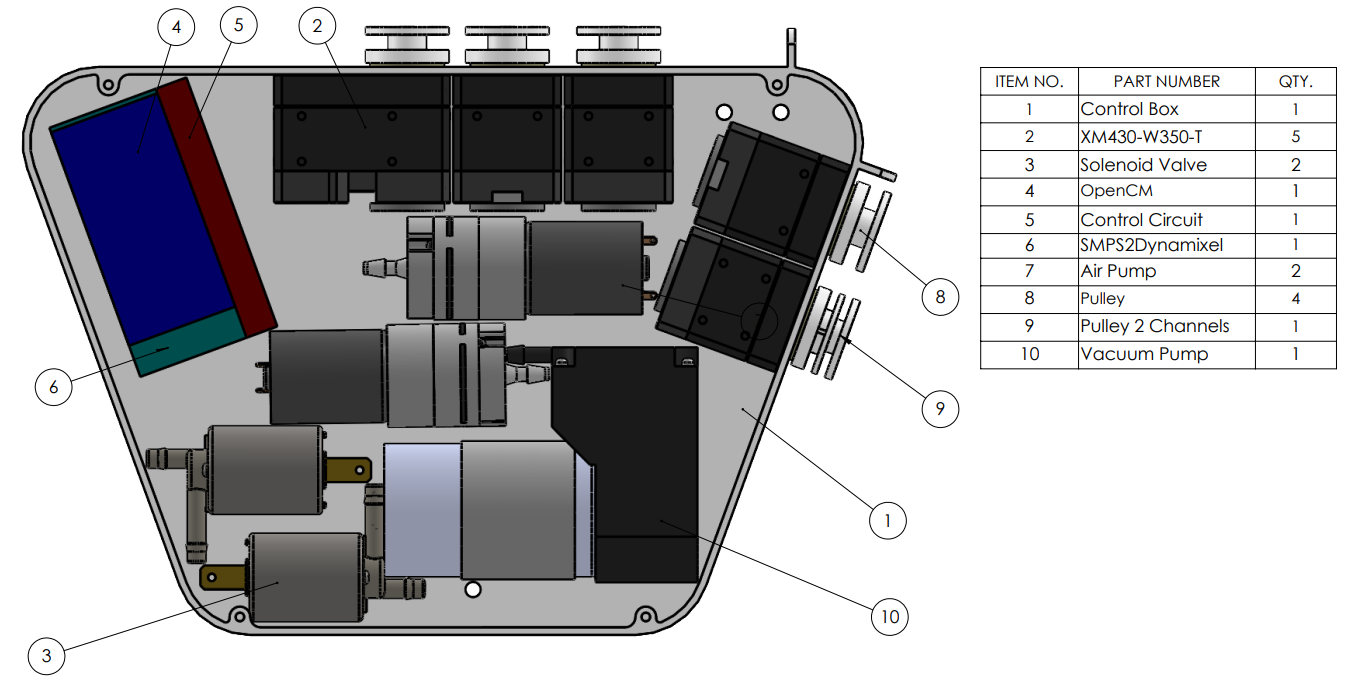
Control Unit Preparation
In order to prepare the control unit you will require the following parts. The 3D printed parts are represented by the white parts. The wiring diagram for the electronics are described in the Build Instructions section of this project.
Robotic Glove Preparation
The preparation procedure of the robotic glove is similar to the soft glove of the body-powered exoskeleton glove (video below). The fabrication processes of the abduction chambers and the inflatable extra thumb are described in the Build Instructions section of this project. Once the 3D printed parts are stitched on the glove, the soft parts (abduction chambers, jamming structures and the inflatable extra thumb) can be glued (with superglue) on the glove in the positions showed in the picture below.

Smartphone Interface App Preparation
In order to control the motorized exoskeleton glove you need to follow the steps below:
- Upload the Arduino code to the OpenCM microcontroller (Available in the GitHub repository).
- Download the Arduino bluetooth controller app.
![]()
- Connect your phone to the Bluetooth module and set up the desired commands according to the Arduino code.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.