 Mattias
MattiasSystem Overview
The Actuators
The whole system is designed around a custom designed planetary gearbox for the NEMA 11 and NEMA 17 motors. The actuators for the NEMA 17 motors are geared down with a ratio of 28.4:1, while the smaller actuator for the NEMA 11 is geared 19:1. These can be found here:
- Large Actuator: https://www.thingiverse.com/thing:4428749
- Small Actuator: https://www.thingiverse.com/thing:4423264
The robot uses 3 of the large actuators for the NEMA 17 motors on joints 1, 2, and 3, and a single small actuator for the NEMA 11 motor on the joint 4 (for the end-effector).
The Structure
Once the actuators are assembled, they are connected to each other with the list of 3D printable parts. It is a simple design around the actuators and they shoulder, forearm, and base joints can easily be fastened together (.STL files attached to the project).
The Electronics
Currently all actuators are open-loop control as this arm does not require a high torque load where steps could be lost, however I have ordered several AS5600 encoders to add closed loop control swell as implement an accurate homing feature.
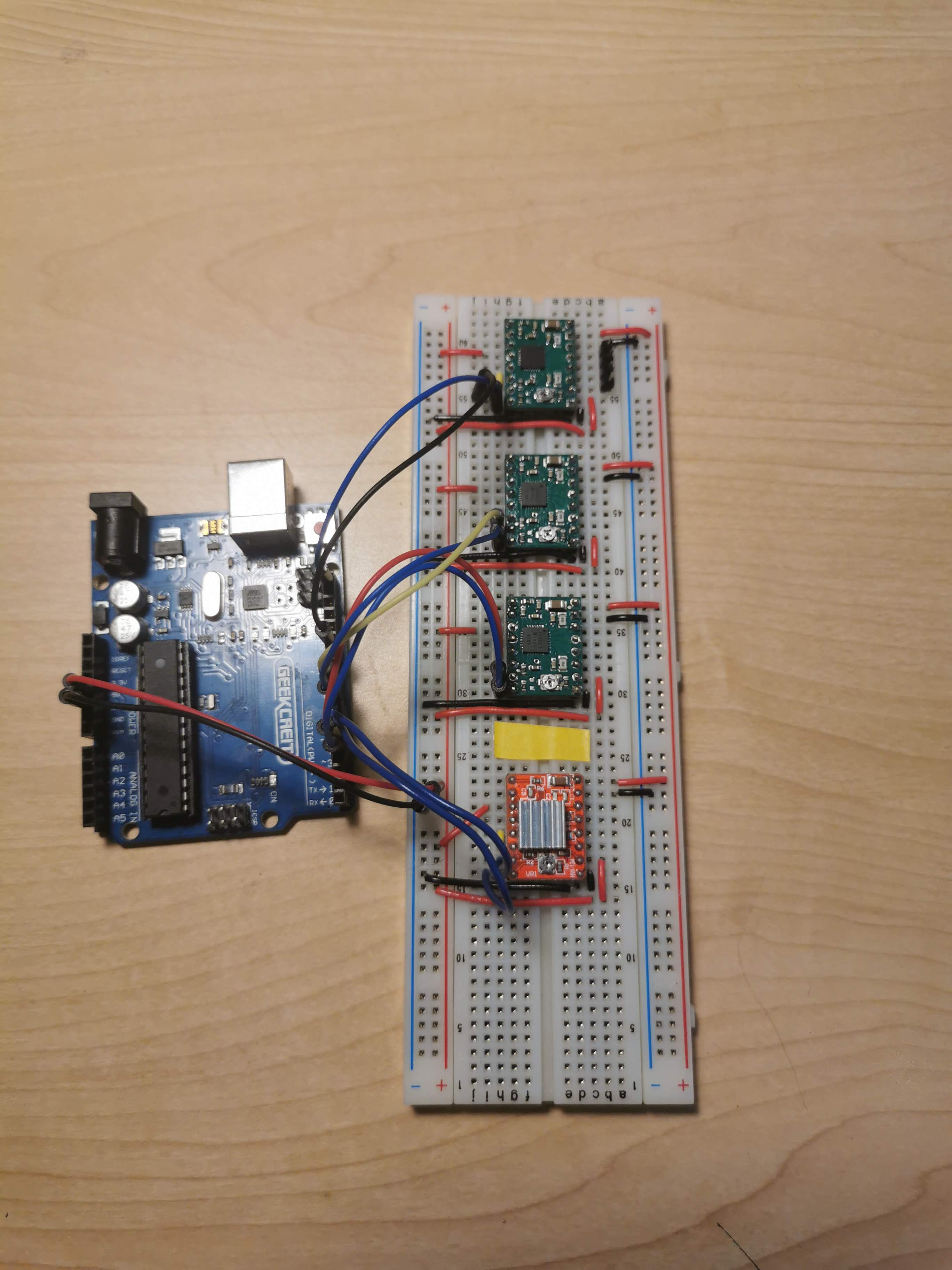
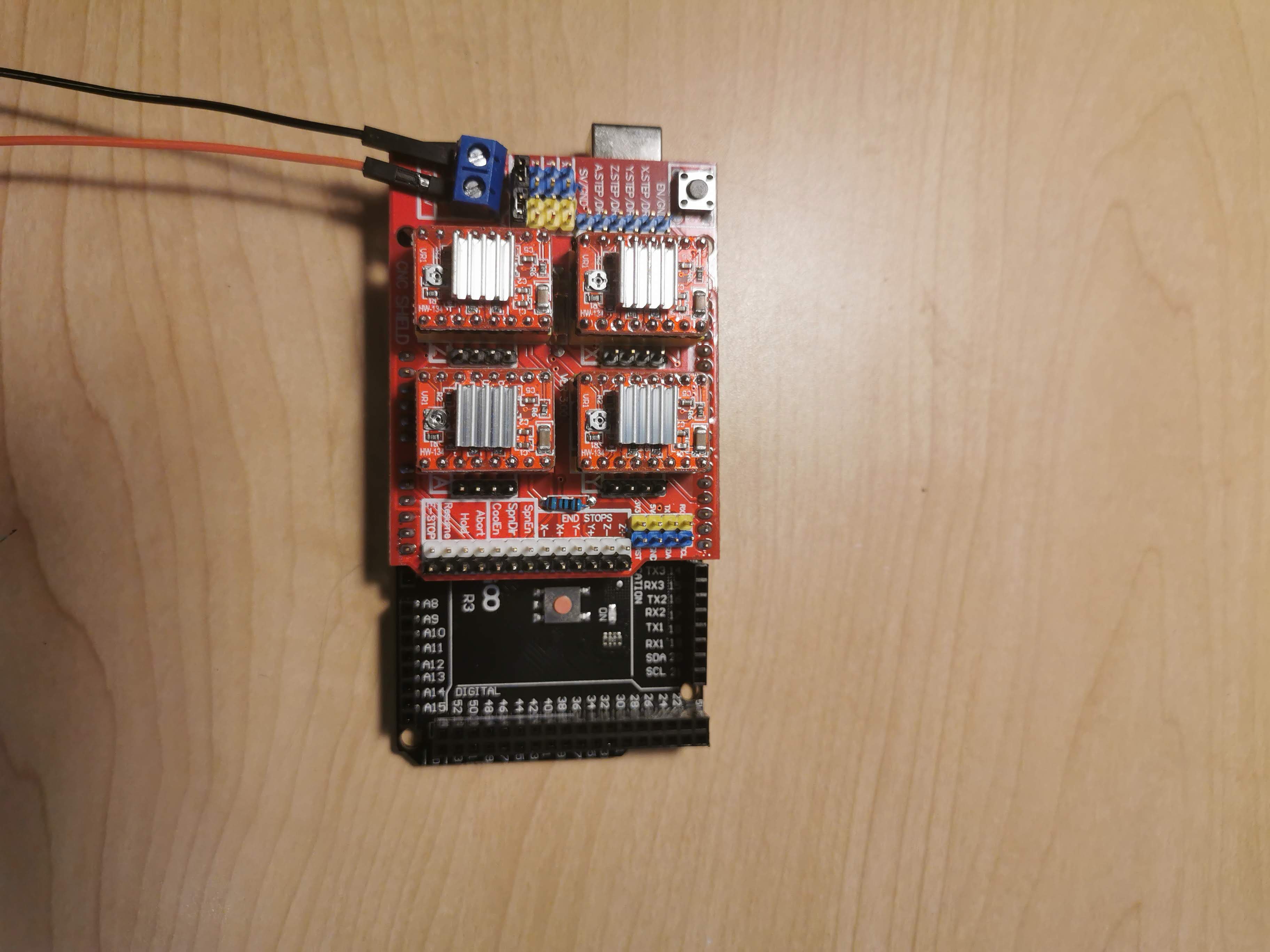
The steppers are controlled using the A4988 controllers in the 1/4 step configuration. I developed a simple proto-board circuit to the electronics control box (to be built).




 Antonio Regueira
Antonio Regueira
 Aaed Musa
Aaed Musa
 Petar Crnjak
Petar Crnjak
Would you mind to share your solidworks files?i want to export Urdf xml