Opis działania robota
Po zasileniu robota robot podąża wzdłuż wyznaczonej linii rozstawiając klocki co
określoną odległość. Po opróżnieniu magazynu z klockami robot uruchamia alarm
dźwiękowy oraz zaświeca diodę LED i zatrzymuje się, w celu uzupełnienia magazynu
przez operatora. W przypadku, gdy robot napotka przeszkodę uruchomi się alarm a robot
się zatrzyma.
Układ mechaniczny
Projekt robota oparty jest o koncept robota czterokołowego, z napędem tylnej osi.
Napęd zrealizowano za pomocą dwóch osobnych silników, z czego każdy z nich jest
sterowany osobno co pozwala na ustalanie innej prędkości na każdym z kół znajdujących się z tyłu robota. Przełożenie przekładni znajdującej się na tylnej osi wynosi 1:1. Odczyt prędkości kół zrealizowano za pomocą enkoderów umieszczonych na kołach osi tylnej. Zamianę
ruchu zrealizowano za pomocą przekładni oznaczonej strzałką na rysunku nr 1. Przednie koła służą do stabilizacji robota. Model robota zamodelowanego w programie Fusion pokazują rysunki 1, 2, 3.
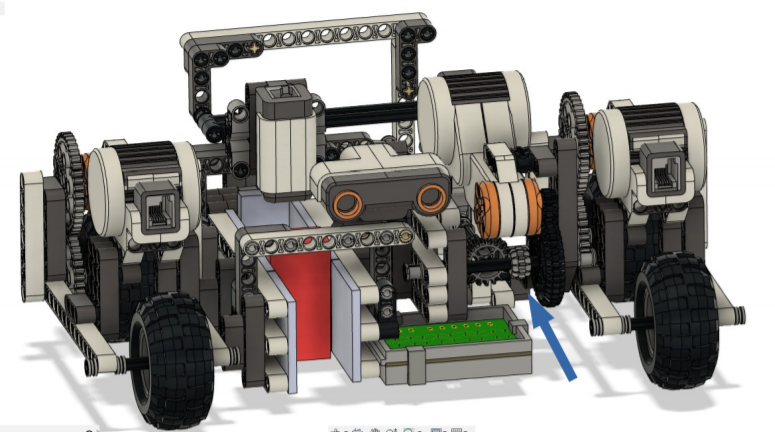
Rys.1. Widok robota z przodu
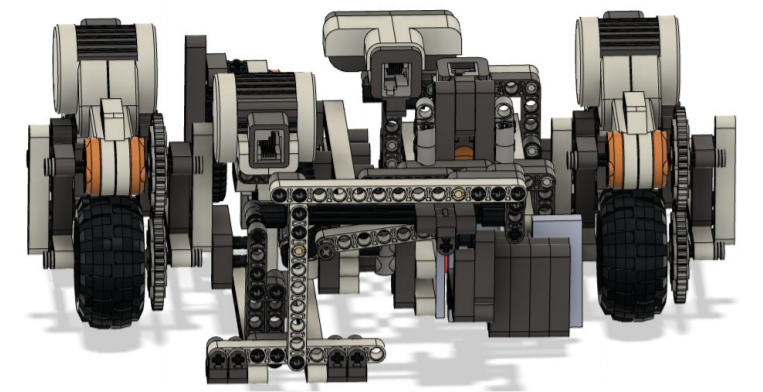 Rys.2. Widok robota z tyłu
Rys.2. Widok robota z tyłu
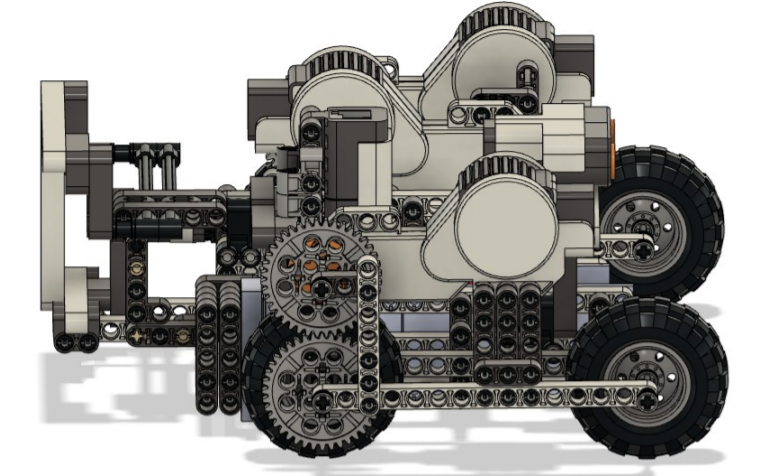 Rys.3. Widok robota z boku
Rys.3. Widok robota z bokuCzęści ścian magazynu zaprojektowano i wydrukowano na drukarce 3D ukazane na ryskunku 4 oraz 5.
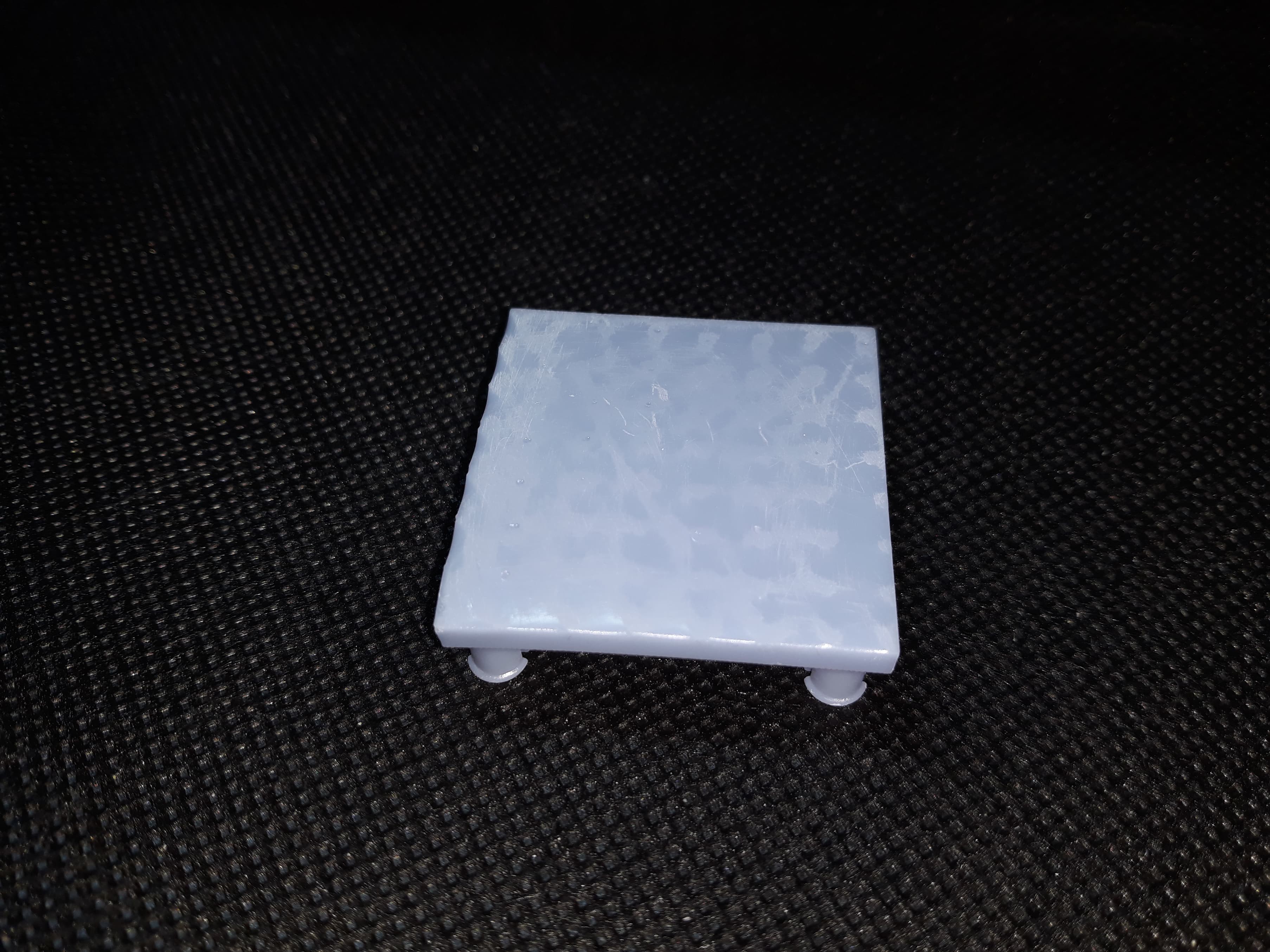
Rys.4. Widok z góry

Rys.5. Widok z dołu
Układ elektroniczny
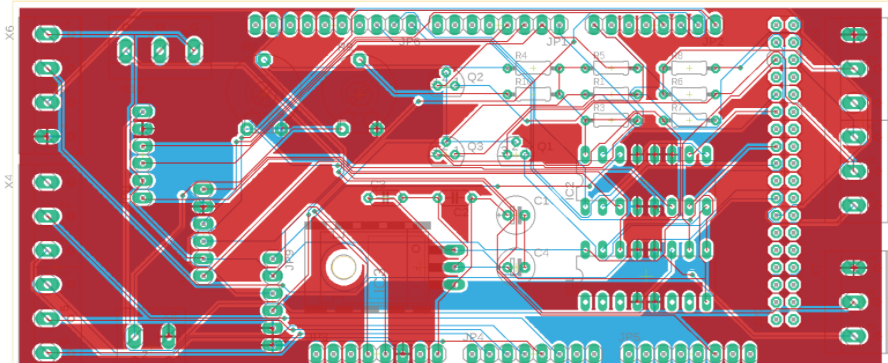
Do sterowania robotem wykorzystano mikrokontroler Arduino Mega 2560. Schemat układu wykonany w programie Eagle ukazany jest na rysunku 6. Zaprojektowana płytka sterująca PCB pokazana jest na rysunku 7. Robot ma wbudowany moduł line follower zrealizowany za pomocą płytki PCB z umieszczonymi na niej pięcioma fotorezystorami i pięcioma diodami (rysunek 8). Posiada on także czujnik odbiciowy obecności klocków w magazynie oraz czujnik ultradzwiękowy, który ma na celu wykrywanie przeszkód znajdujących się na drodze robota.
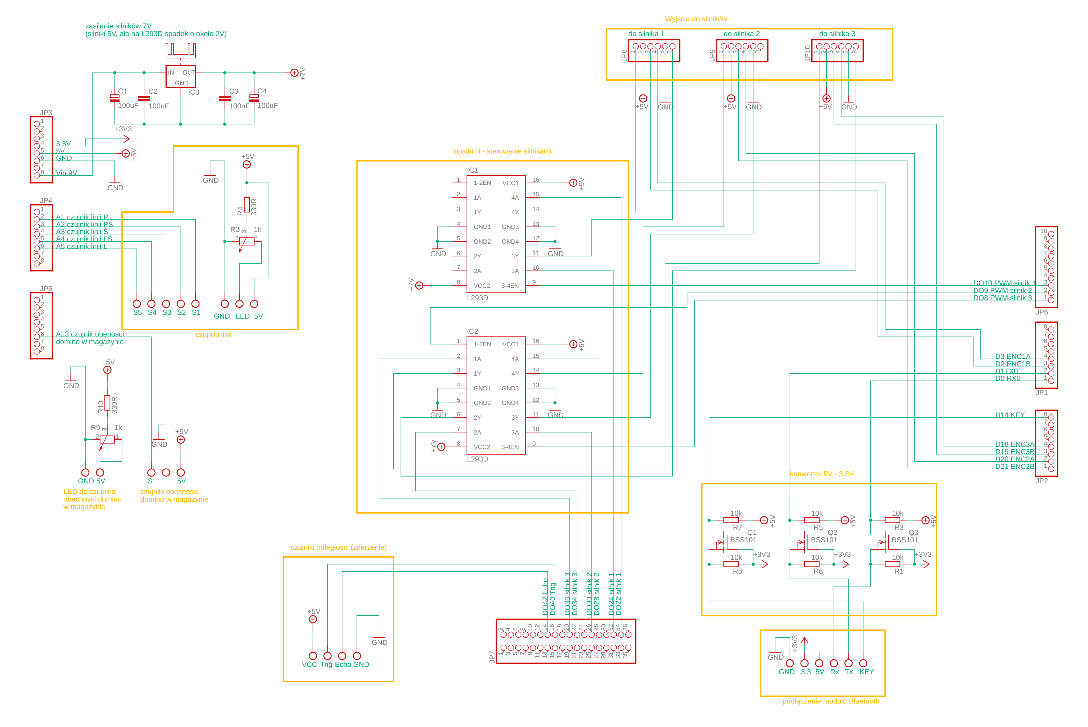
Rys. 6. Schemat układu
...
Read more »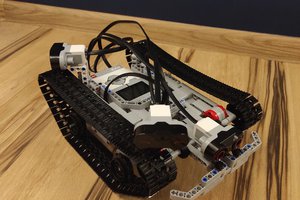

 tab
tab