 Ahead
AheadAfter extensive “on stand” testing and the first few days of having fun with fully assembled Stanley, we felt pretty confident about the stainless steel cables. But we were wrong.

Within a few days - after we Started implementing jumping - Stainless Steel Cables started breaking one after another.

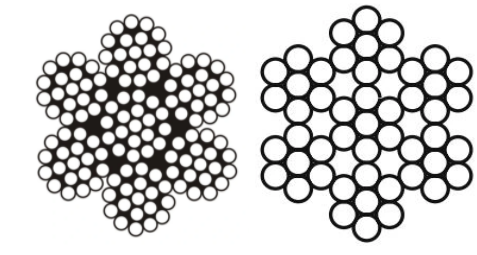
We did tests with thicker cables and different cable constructions. We even built our own machine for testing Cables - the SpringSqueezer (link to the Github repo) :
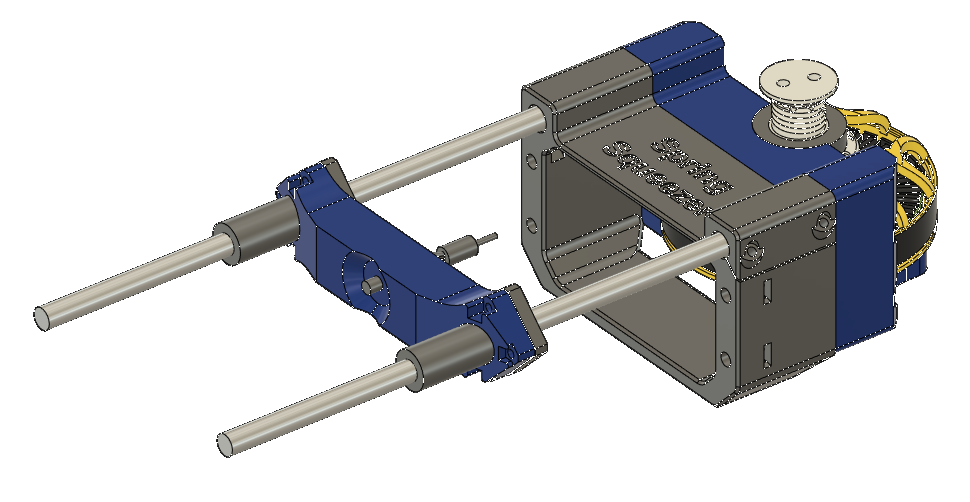
We hoped that a thicker cable or one with more and thinner strands would solve the issue:
But this wasn’t enough. We needed to move to a synthetic cable. After doing the research we decided to go with Dynamica DM20 - a strong synthetic fibre with very low creep.
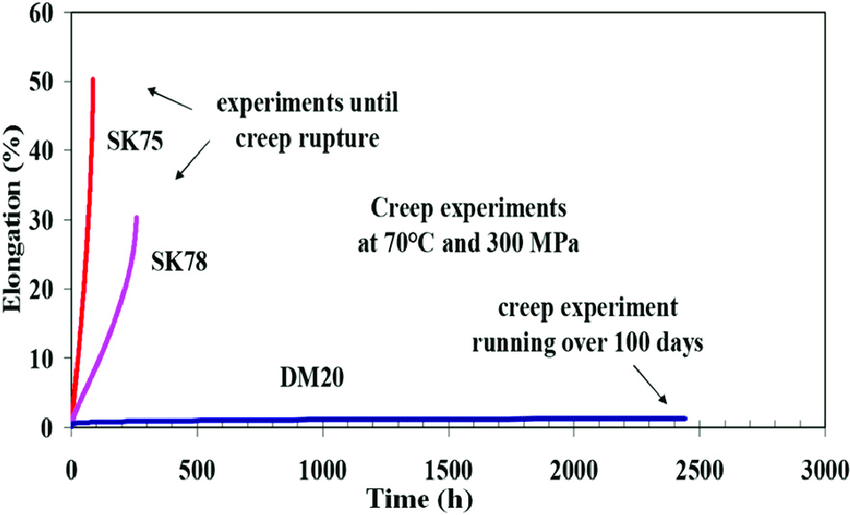
Now all Stanleys we build have a custom DM20 rope in their capstan mechanisms.

And it just works! :)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Which dyneema diameter you use?
Are you sure? yes | no
Very interesting! What do you think is the reason for this observation? Are there any other disadvantages of using the Dyneema apart from the creep?
Are you sure? yes | no