 Kenny
Kenny(Summer 2020)
After the successful flight of the first prototype, it was time to start building a more advanced system. The first prototype literally used kitchen cabinet hardware. Going forward I had 3 goals: 1) More power 2) More reliable and 3) Autonomous.
Power
The servos used on the prototype actually worked to pull down parachute toggles with over 10lbs of force. The problem was that they needed to be geared way down to do so. Changing gear ratios wasn't going to make up for the tiny motor inside the servo, so a bigger motor was needed.
I explored many options - servos, steppers, brushless, and brushed DC motors. Ultimately settled on a 37mm diameter 200 rpm gearbox brushed DC motor. Brushed motors have the best torque at low RPM and that's what is needed here.

Toggle range limiting
One of the first problems with the prototype is: what happens when you reach the "top" of the toggle stroke. The answer is that it starts wrapping around the spool the other direction (clockwise/counterclockwise). So unless you're watching the toggle, there is no way to command the motor "go up". Since it will eventually overshoot and come back down. To fix this problem was very tricky, and continues to be one of the core engineering challenges of this project: How to apply range limiting to the toggle tether? I solved this by adding a limit switch that is triggered when the spool starts winding too far "clockwise":

The 3D printed enclosure also helps keep the line from unwinding off the spool, fixing a possible failure mode when there is slack in the line.
I had never 3D printed anything before. To make this happen I had to buy a 3D printer (Monoprice Voxel) and learn to use CAD software for the first time. Because I'm a software developer, and apparently like pain, I designed ParaDrone in openjscad.
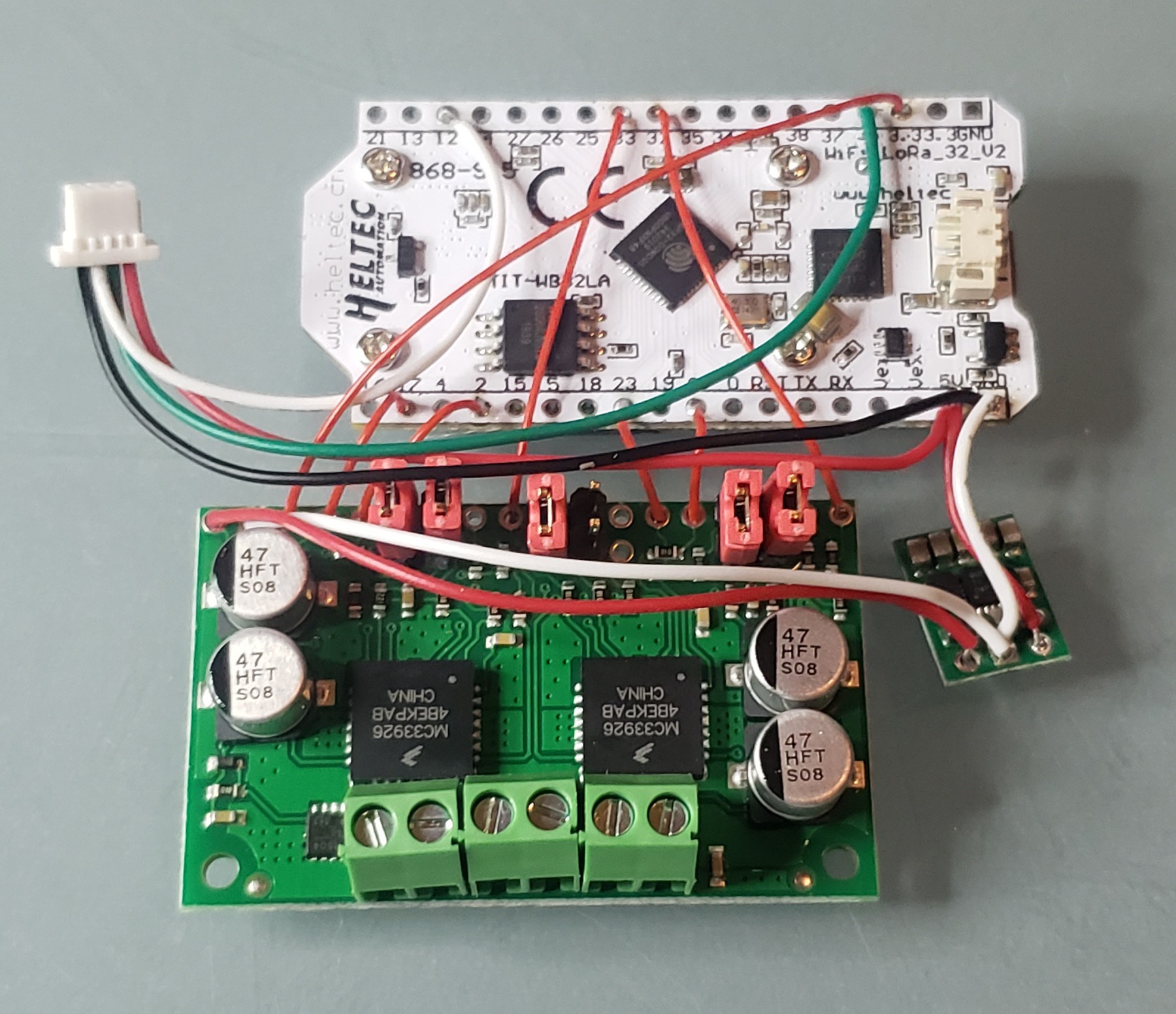
Autonomy
Finally, Remote Control (R/C) is cool, but the goal here is to have an autonomous self-flying parachute. So that means there needs to be a microcontroller. I have played with Raspberry Pis before, but it felt like the wrong tool for the job. Since it's a full computer, the Rasberry Pi has slow boot time, and higher power requirements than an Arduino. But I had never done any embedded systems development, so add that to the pile of things to learn for this project.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.