 Aaed Musa
Aaed MusaIn all versions of the actuator I had 7 main goals:
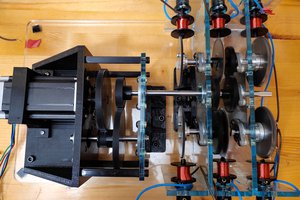
The actuator will be...
- 3D printed
- small in size
- high in torque
- relatively high in speed
- able to provide position feedback
- adaptable for different robots
- low cost
In this project I've engineered and designed several 3D printed Robotics Actuators in hopes of using one for a future quadruped Robot.
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
In all versions of the actuator I had 7 main goals:
The actuator will be...
Gen 4 V5 Actuator.zipActuator STEP Filex-zip-compressed - 1.03 MB - 02/20/2021 at 05:58 |
|


Is the actuator backdrivable? The first one that I saw that would fit my idee of an robotarm. Nice Work man.

 Greg Zumwalt
Greg Zumwalt
 Colby Johnson
Colby Johnson
 TheMixedSignal
TheMixedSignal
hey nice project. do you have an idea of the price to build a motor like that ? do you have a link to the brushless that you used ?