0%
0%
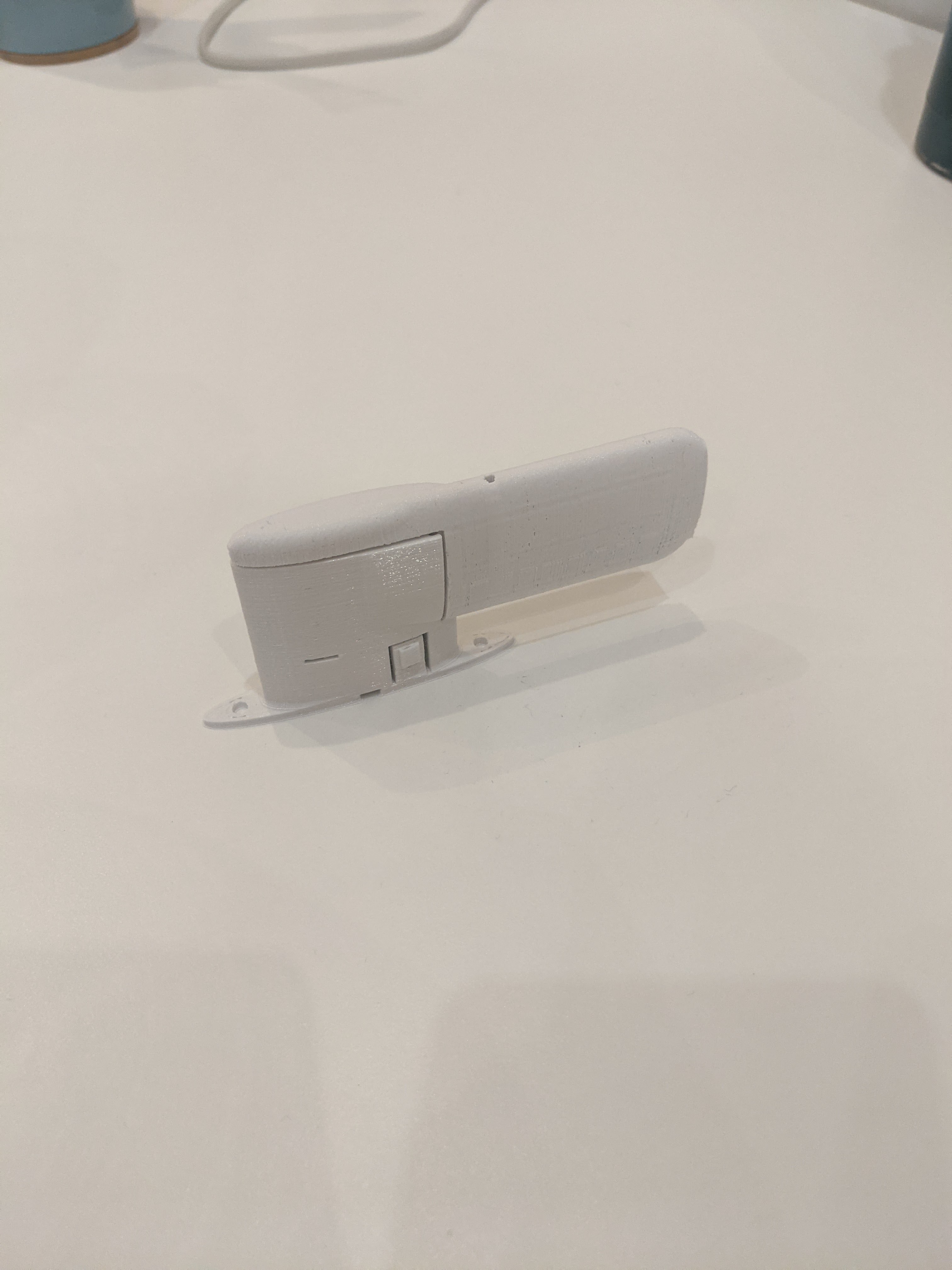
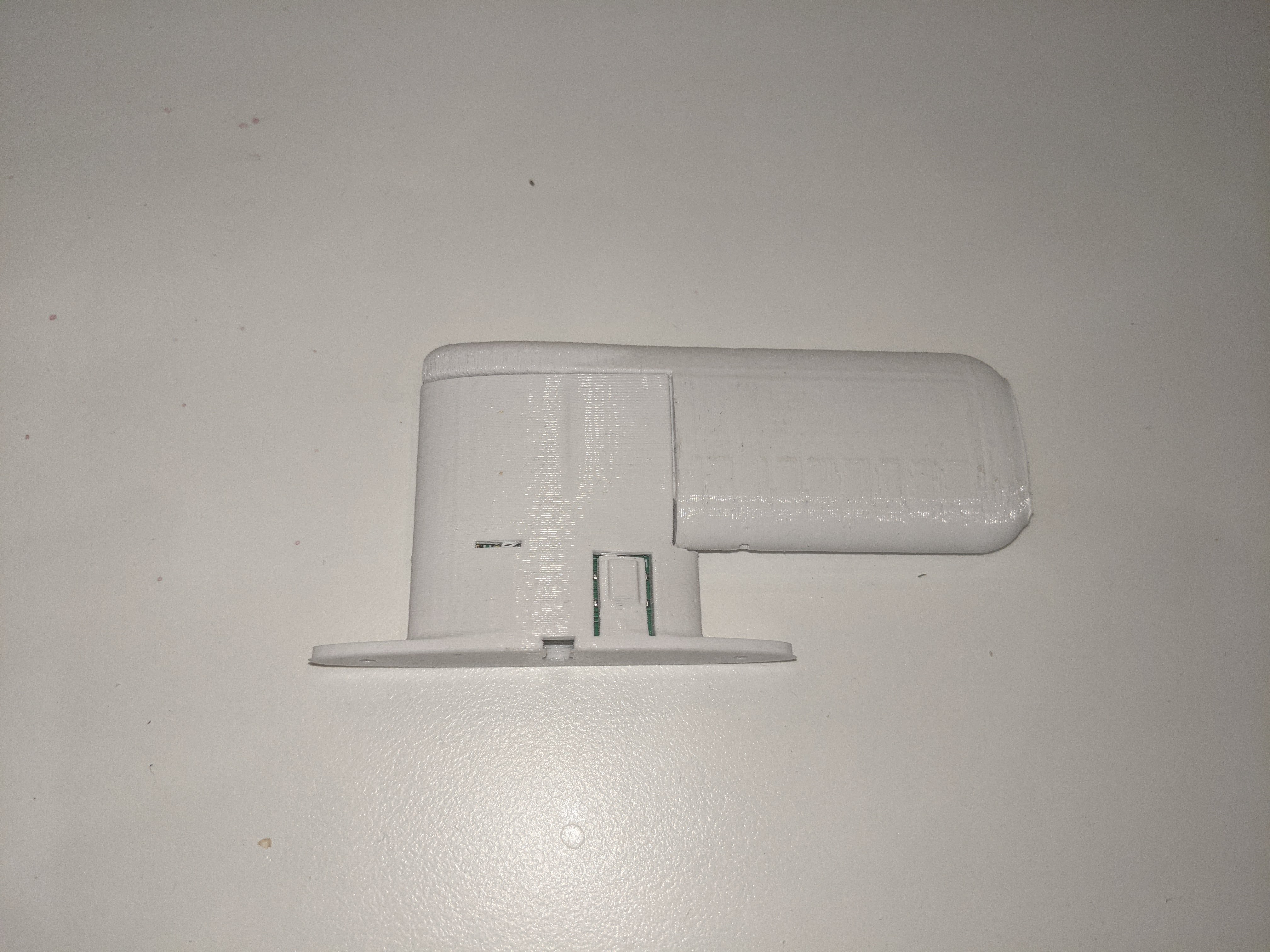
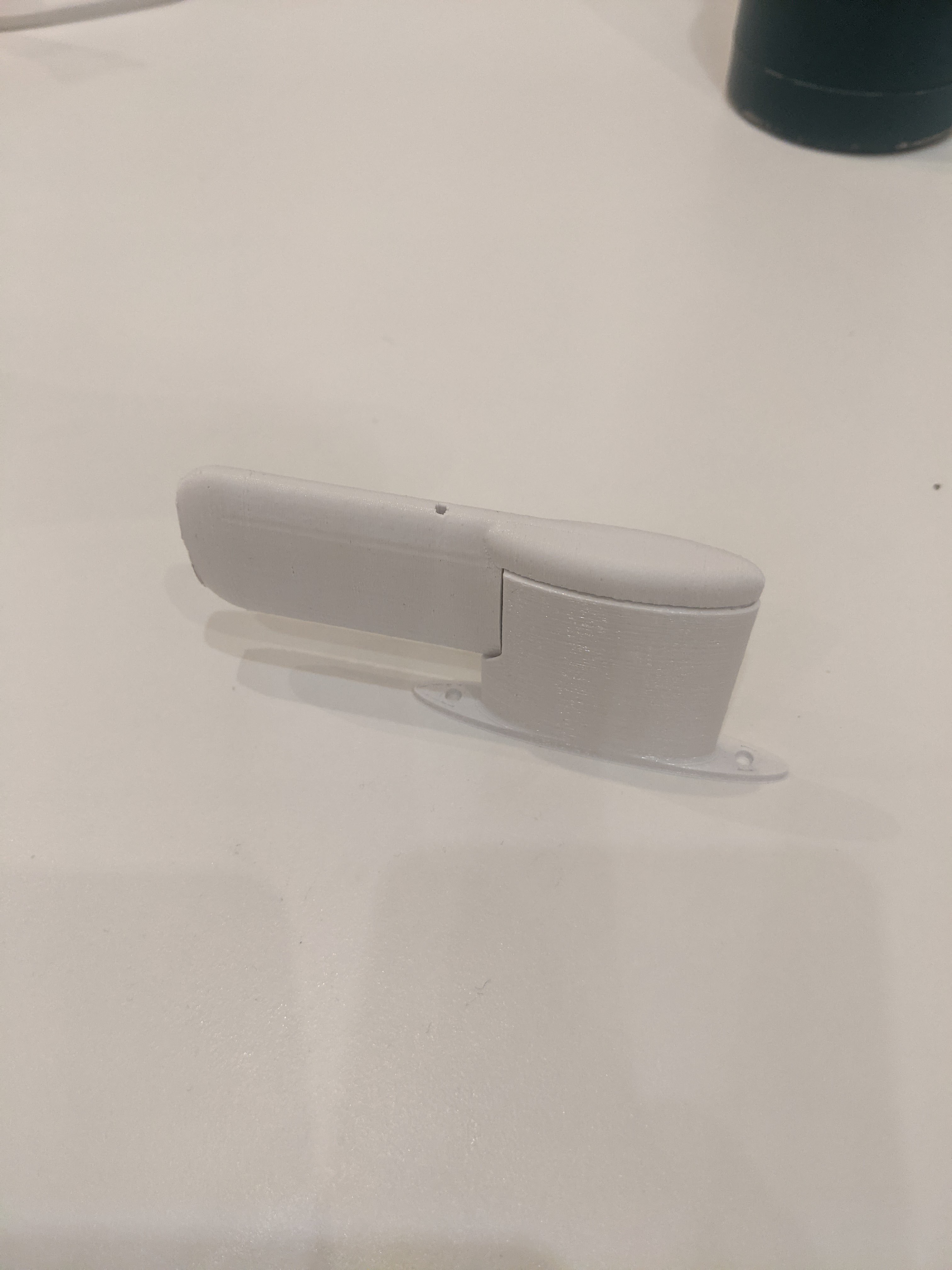
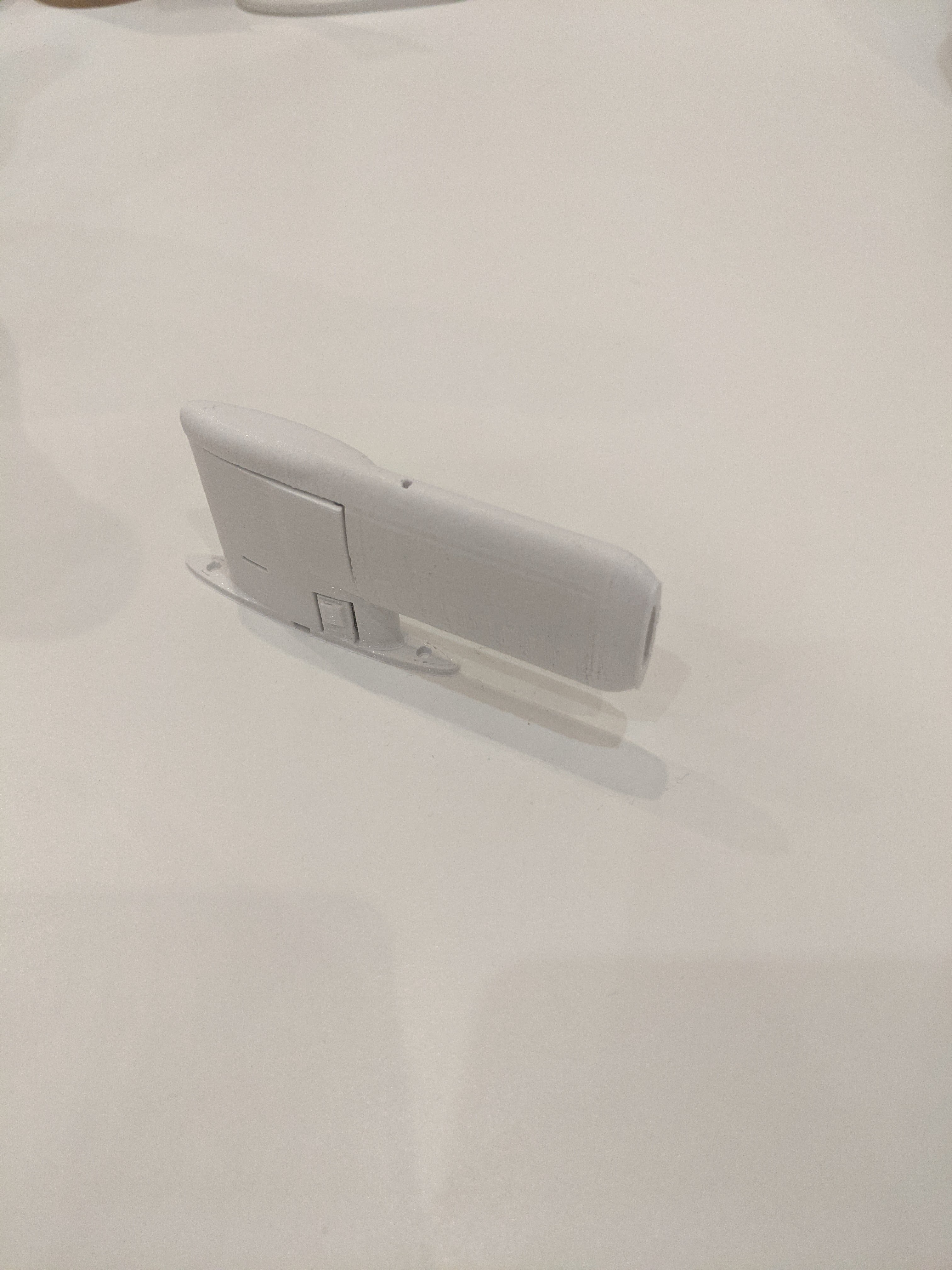
Cheap airspeed sensor for INAV
Airspeed sensors are quite expensive, while barometers are cheap. So why not making an airspeed sensor using 2 barometers?
 Giovanni
GiovanniBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 J
J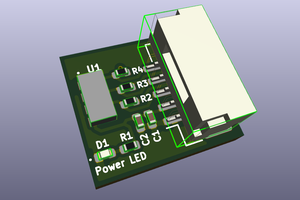
 mbsg99
mbsg99
 Annie Ho
Annie Ho