 mircemk
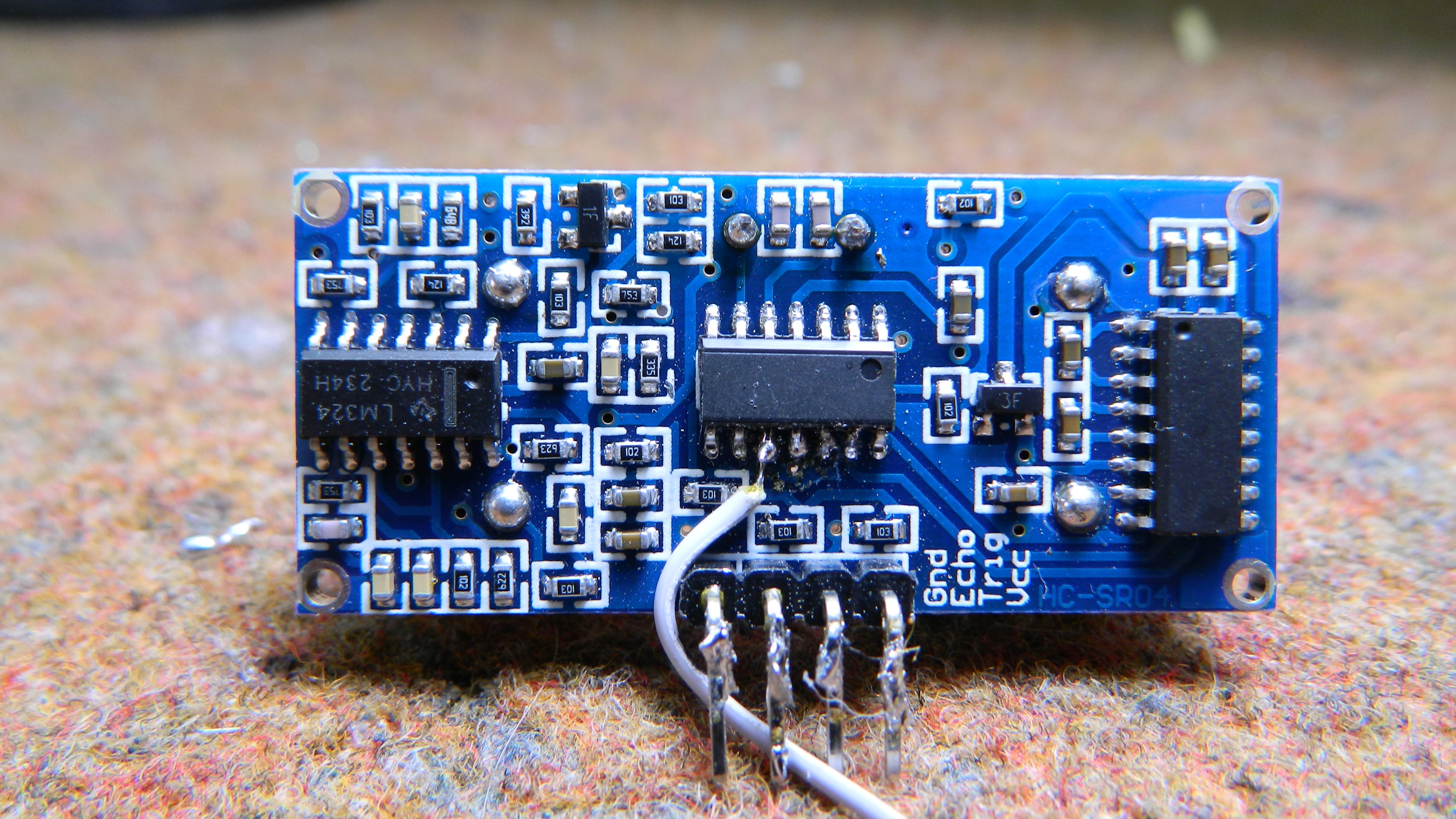
mircemkWith a small modification of the ultrasonic sensor module, this radar is capable of detecting multiple objects with each ping, which means that it can also detect an object behind an obstacle. Points on the radar display, representing primary objects are displayed in red, and points representing secondary objects are displayed in blue.
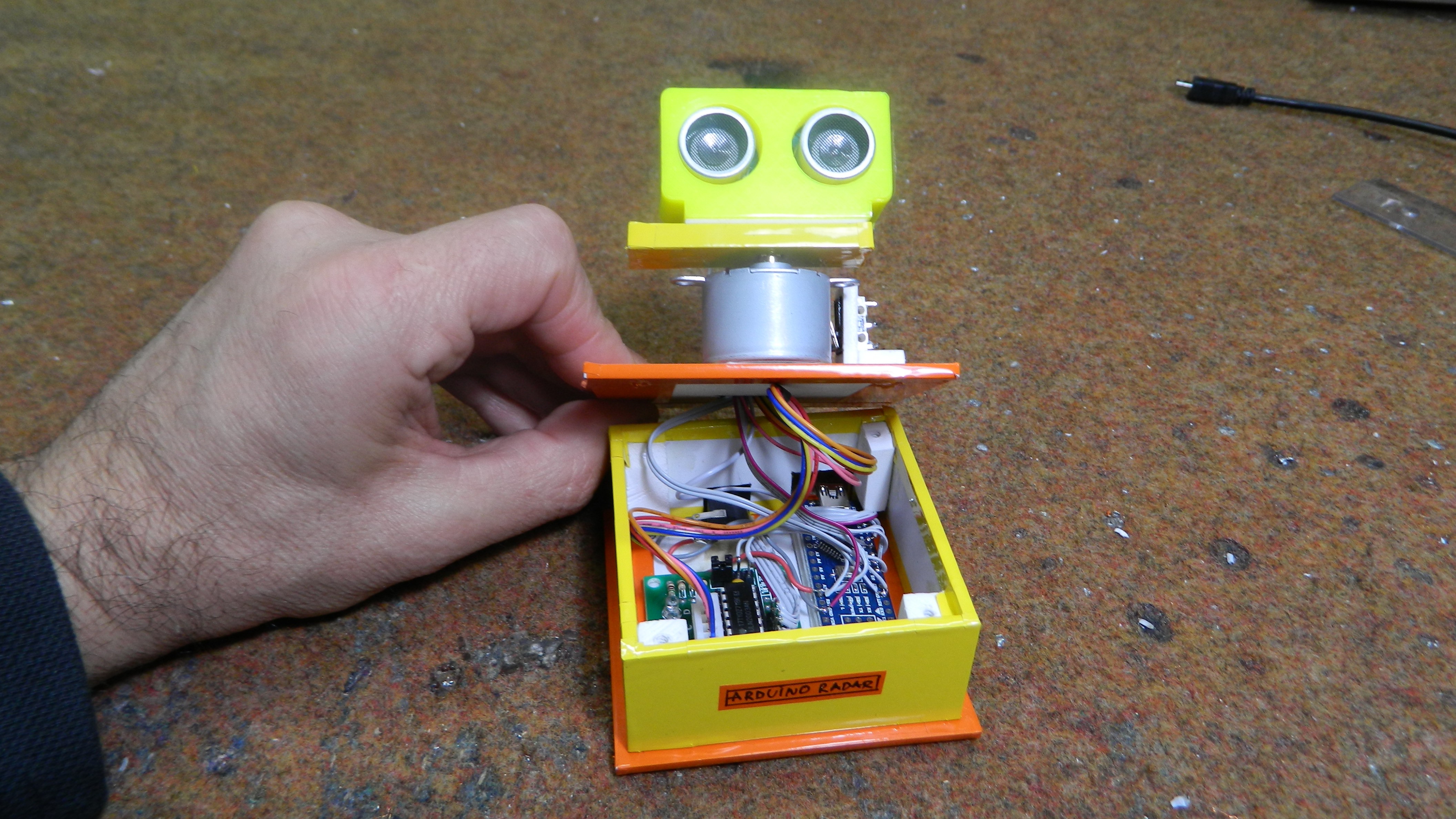
Device is very simple to build and consist only a few components:
-Arduino Nano Microcontroller
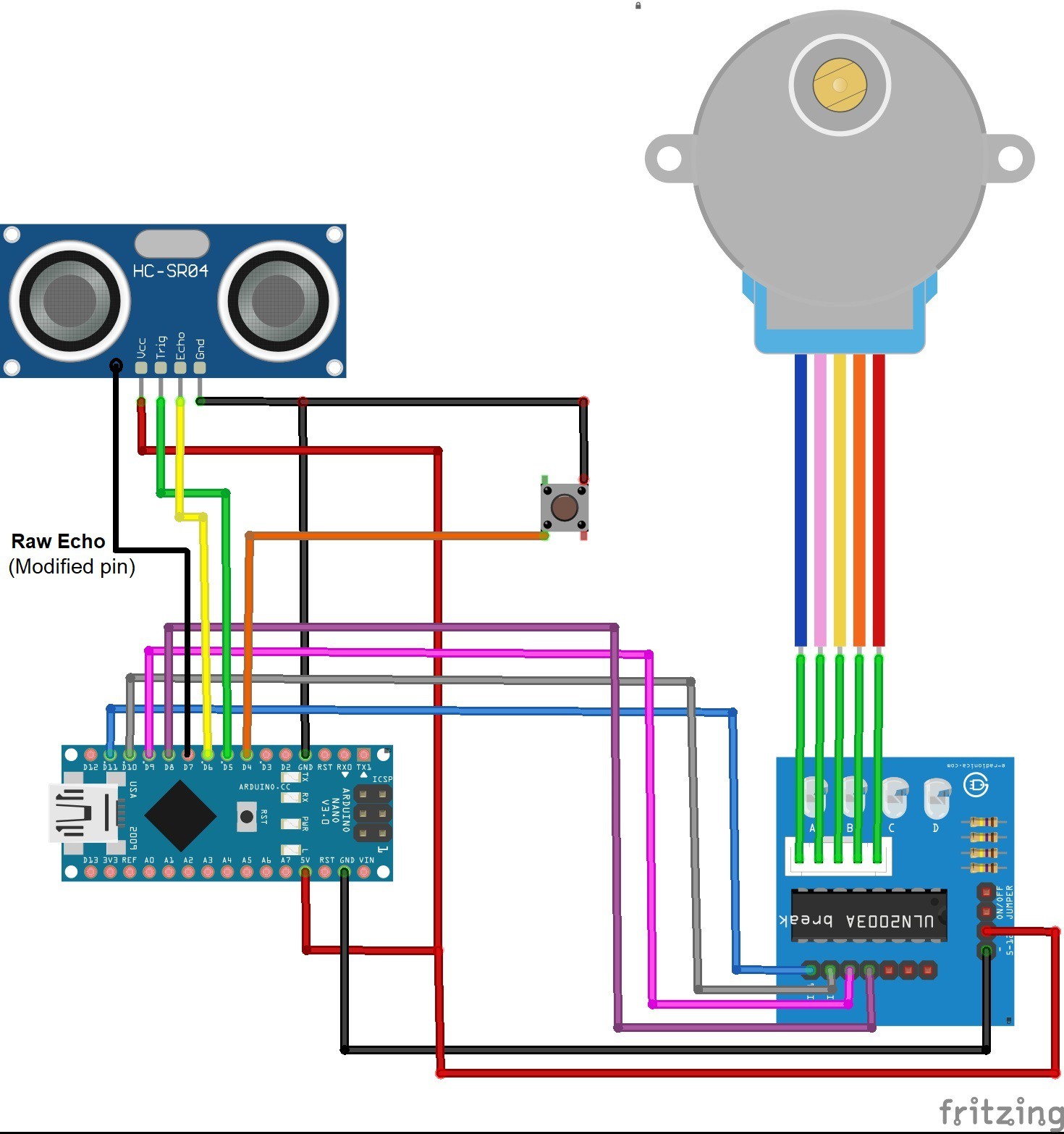
-modified HC-SR 04 ultrasonic sensor modified with Raw Echo pin
-(28byj-48) Small 5V stepper motor
-ULN2003 driver board for stepper
-and micro switch
Arduino data is sent to the personal computer via USB. The received signals are processed in the Processing program which generates a nice graphical user interface in the form of Radar. A microswitch is necessary as it is not possible to rotate the stepper motor by hand due to its internal gearing. The azimuth and distance of each primary feature are shown in red. Any echo from a secondary object is displayed in blue. Without changing the sensor, you will only see red objects. More distant objects require more surface area since most of the acoustic energy is lost as the beam propagates, plus back echo also propagates.
First we turn on the power supply and the radar is set to its initial position by means of the microswitch. Then through the USB cable we connect the radar with the Processing program of the PC. Now we start the Processing code and the Radar starts scanning.


 takayuki.kosaka
takayuki.kosaka
 Tony-Lin
Tony-Lin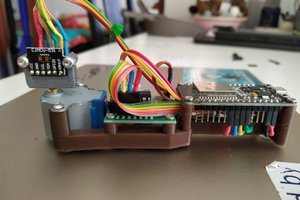
 Owen
Owen