 meatqueen
meatqueen
Premise
'Tachycardio' is a larger-scale, higher fidelity iteration of a previous biometric robot project 'Two products of a heartbeat'. The handmade chassis of 'Two Products' limited its walking ability. With biometric capabilities out of the way, 'Tachycardio' is an exercise in the articulation of a robot.
Purpose
Tachycardio is being developed for a show by Elektrolab in Brisbane due to be completed sometime before September. The show is conceptualised as an ecclectic arcade, Tachycardio being placed among other interactive art pieces.
Concept
Users race a crawling, wiggling pupa-larva-robot with their heart rates across a surface. There is a random chance that a large, crab-like robot controlled by all the player's heart beats emerges mid-game sweeping the racing surface. The game temporarily switches to a cooperative mode as the players have to attempt to align their heart beats.
The concept is very similar to my previous project in that the goal is to ask the audience to identify with their heart beat as a life giving process they have little direct control over, and subsequently highlighting our dependence on the biological and the subconscious. In Tachycardio, asking the user to attempt to control their heart rate, accelerating it potentially to an uncomfortable extent, makes them super aware of their heart and its limitations, perhaps at the cost of emphasis on the subconscious.
I'm hoping a competitive/cooperative premise will engage the audience more. The power of visualising biometrics is demonstrated throughout interactive art.
Sean Montgomery uses interactive biometrics frequently in projects such as Hivemind (that explores subconscious communication of brainwaves between individuals) and Emergence (which creates a visual link between electronics and the biological body).
The power of organic machines in a fine art setting is demonstrated in the portfolio of Michael Candy, who anthropomorphises and mystifies robots. See: Little sunfish, Cryptid, Azimuth.
Robot: Pupabot
Design
Aesthetic
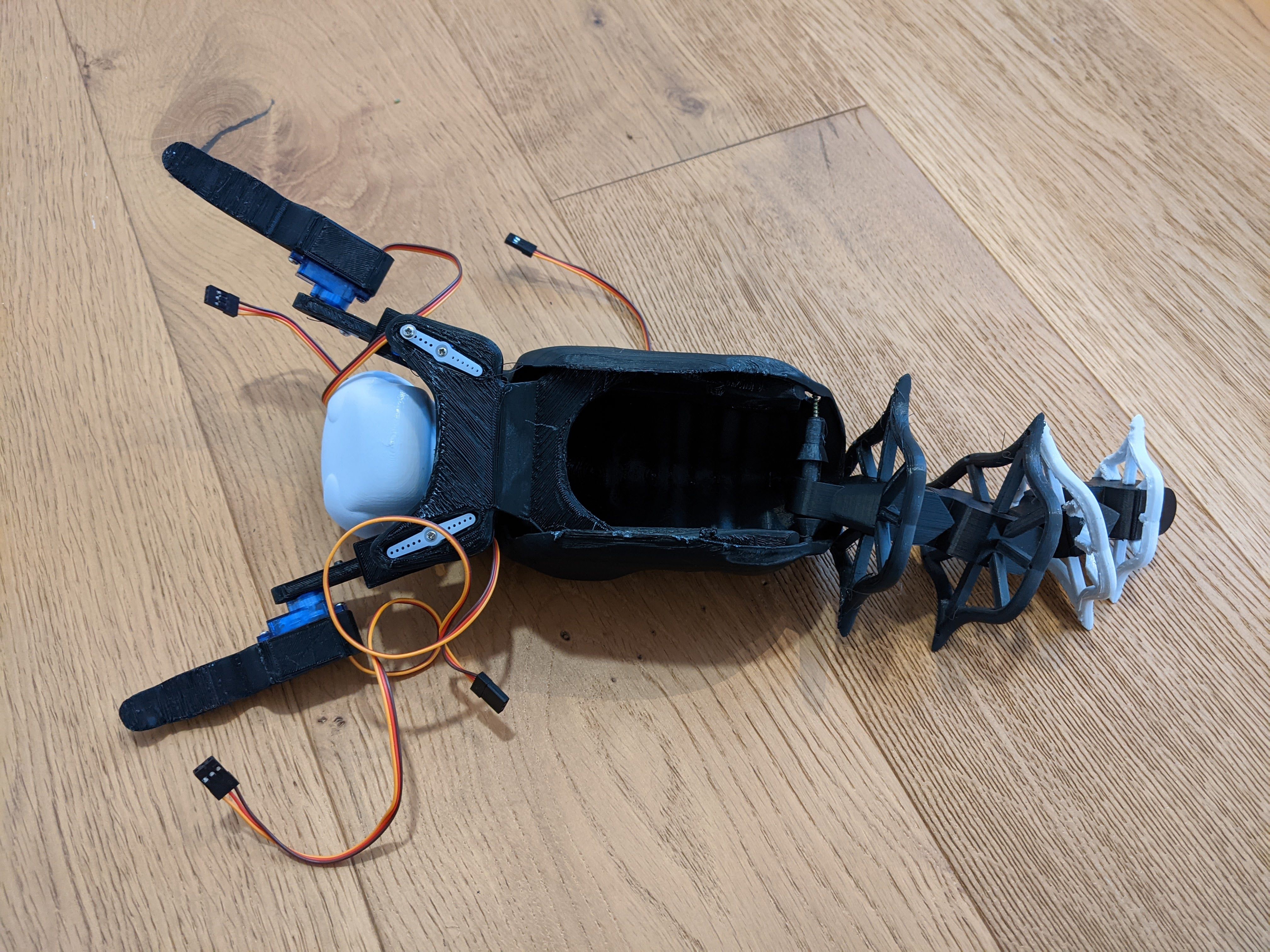
The robot combines some features of sea fleas / mole crabs and a darkling beetle pupa which I've handled lots through my mealworm farming adventures. The tail will be covered in sand-coloured suede and the eyes will glow bright white.


Technical
The gait of the robot is inspired by Slant Concepts' Crawling Robot, After investigating a dozen modes of robot locomotion, I chose this gait because it is simple and stable while still being dynamic and organic. Other gaits rely on a considered centre of mass or were not sufficiently dynamic. The arms of the Pupabot are inspired by hexapod designs, but specifically I looked to Jason Leung's Quadraped Robot.
The print-in-place tail is inspired by the many flexi-toy designs on Thingiverse.com, such as this lizard.
Fabrication
Cad
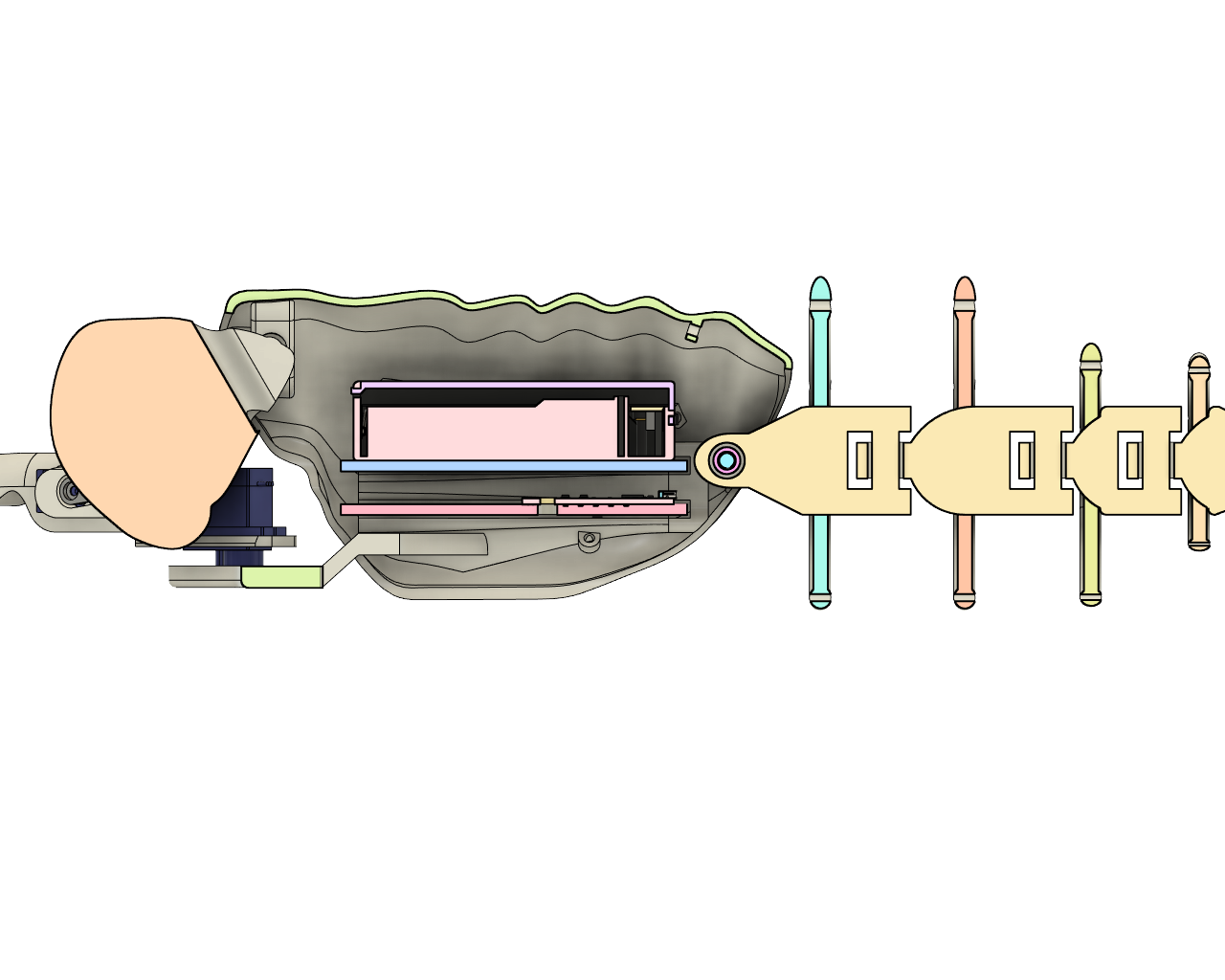
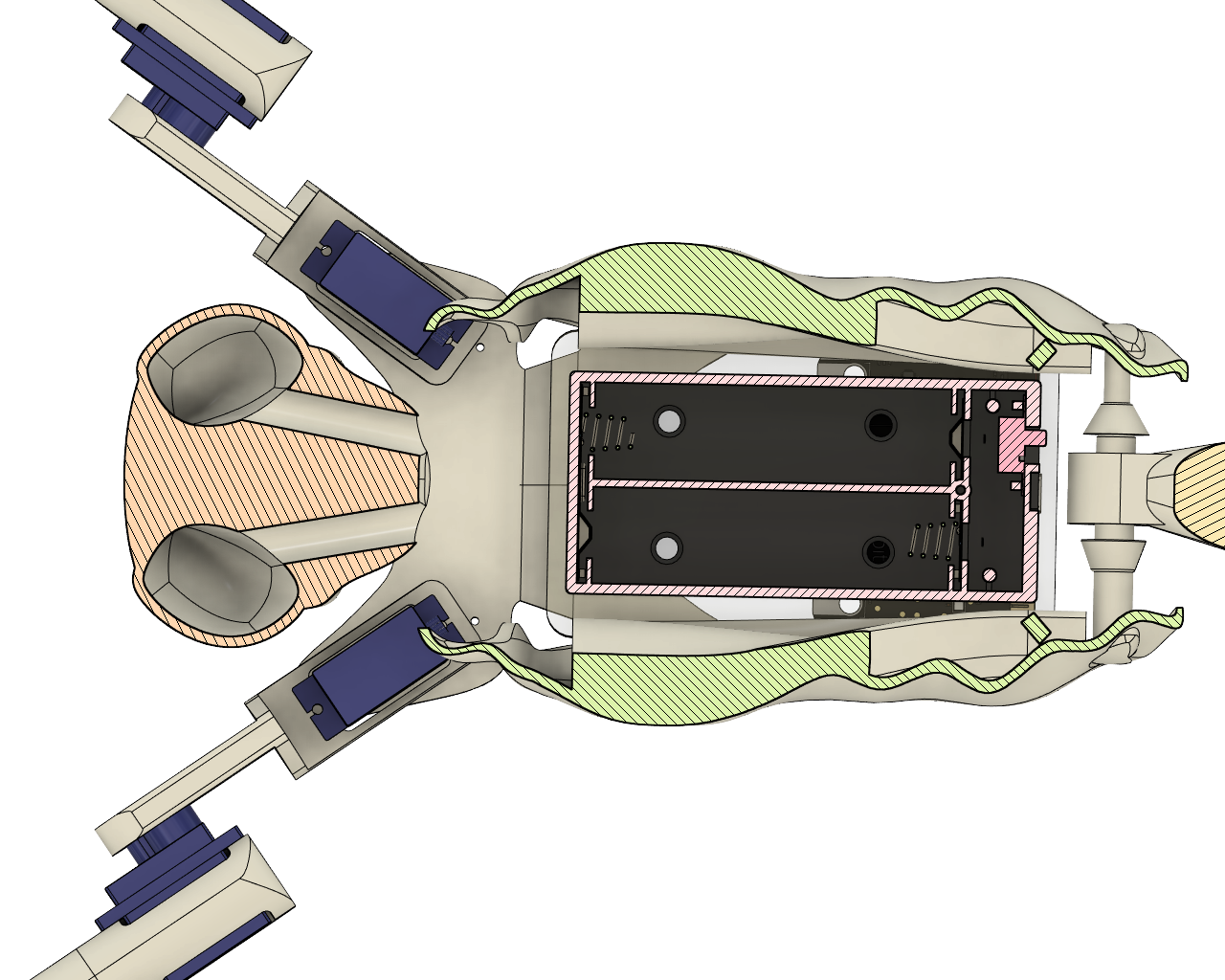
The shell houses two acrylic plates supporting the power supply and Microbit. The plates sit on rails and are stopped at the end. I suspect after prototyping I might have to pitch the tails down toward the stoppers, but the shell might also be in a tilted position due to the gait anyway,
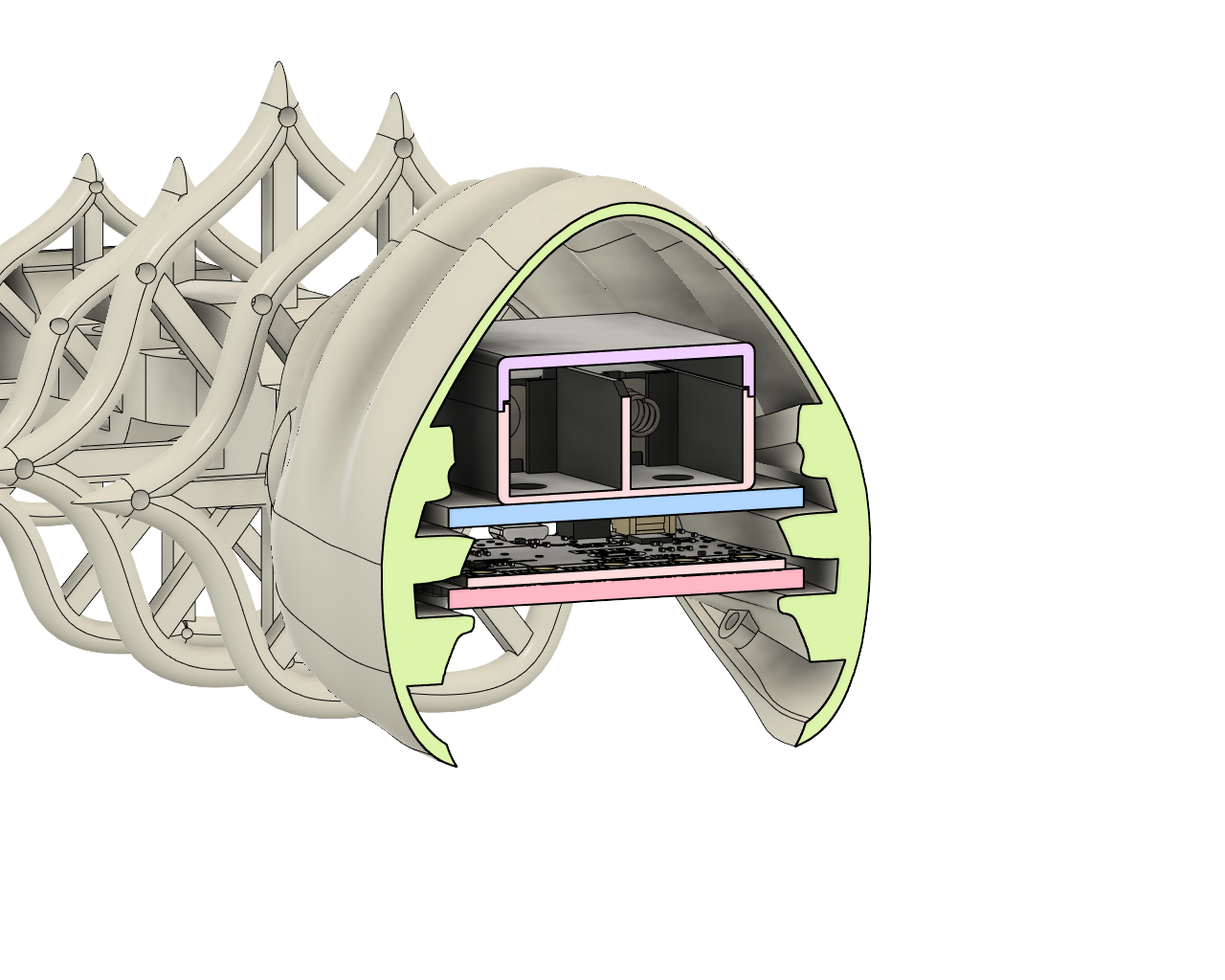
Another view of the shell cavity.
7.5mm tunnels for 5mm LEDS to be inserted into the eyes from the inside. The eyes are a thin-walled cavity so that they pass through but diffuse light while the head is solid (depending on infill).
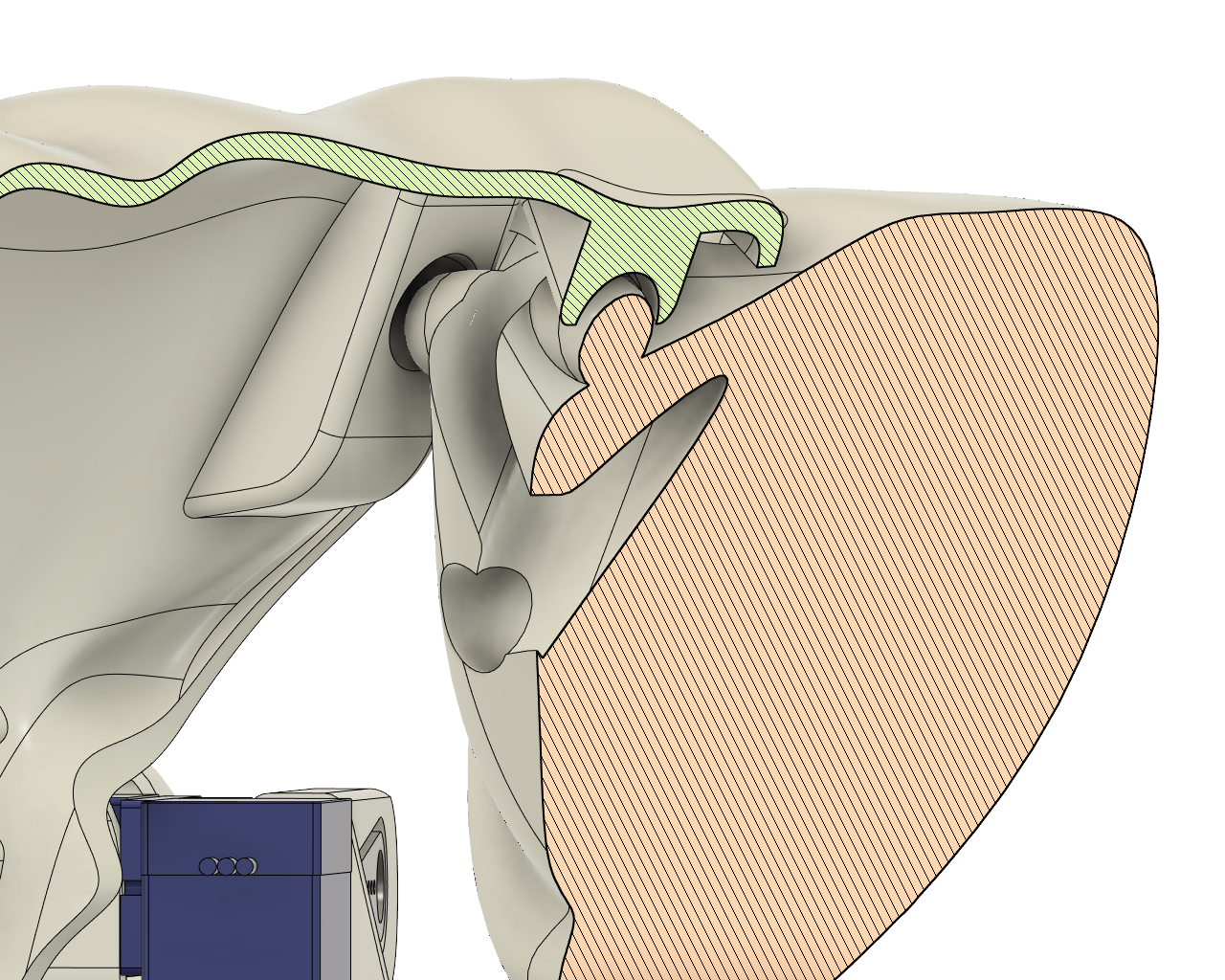
The head is held in place by (hopefully) flexible prongs that compress with a pinch.
The Print-in-place tail chain is attached to the shell via a separately printed axel. It took extra time to figure this one out and I am not entirely sure that it will work. I will have to find out through physical prototyping.
First the inside components of the axil are inserted into the hole of the tail chain. Then caps are inserted into the inside components of the axil through the outside.
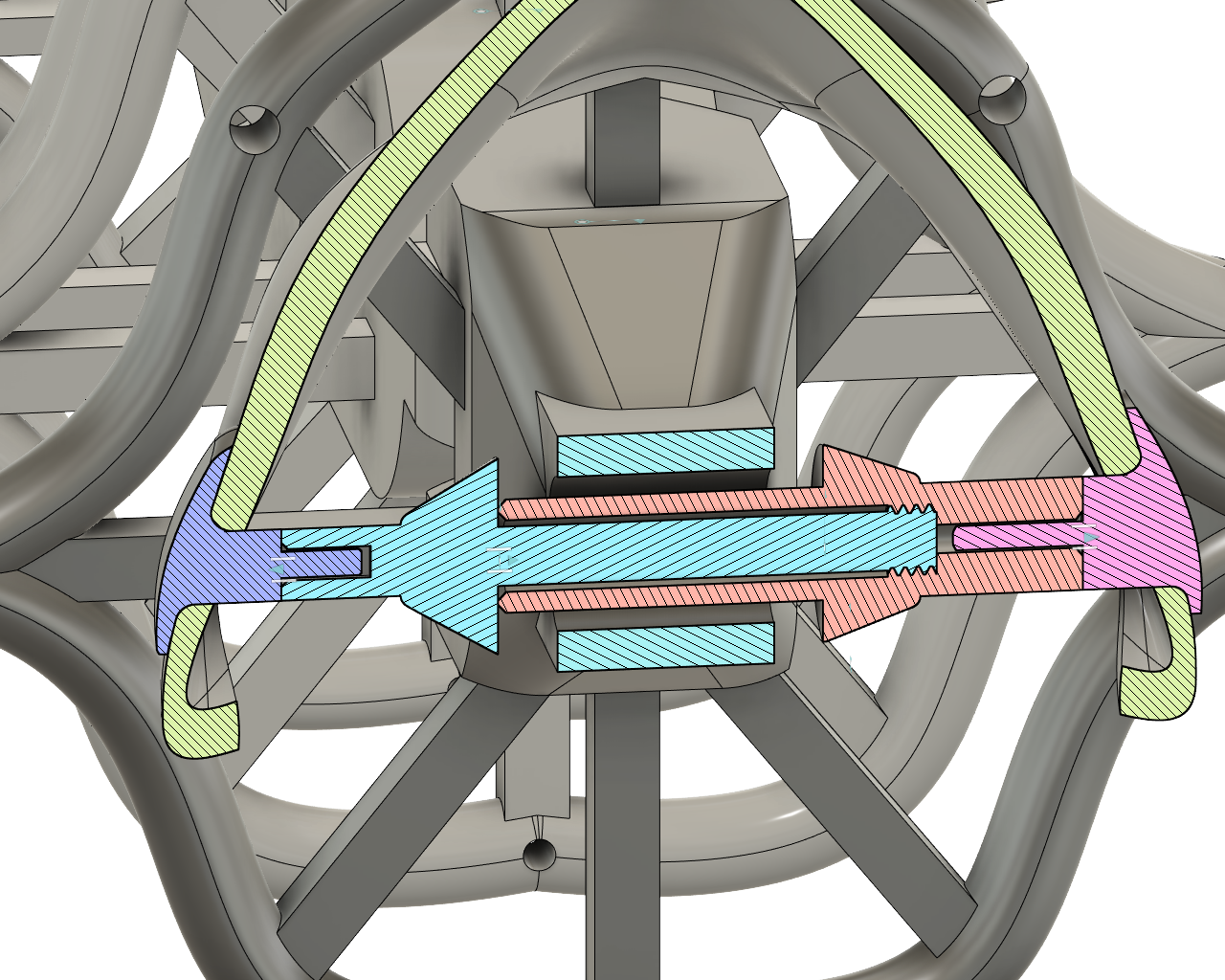
Comes apart like this:...
Read more »


 Cirmall
Cirmall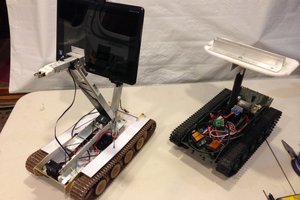
 JackRC
JackRC
 dannyvandenheuvel
dannyvandenheuvel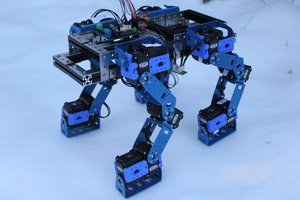
 Dimitris Xydas
Dimitris Xydas
There has been a great deal of value to me in my involvement with the project. Would like to share it with the Tierbestattung Balingen team so they can also read it and implement something new.