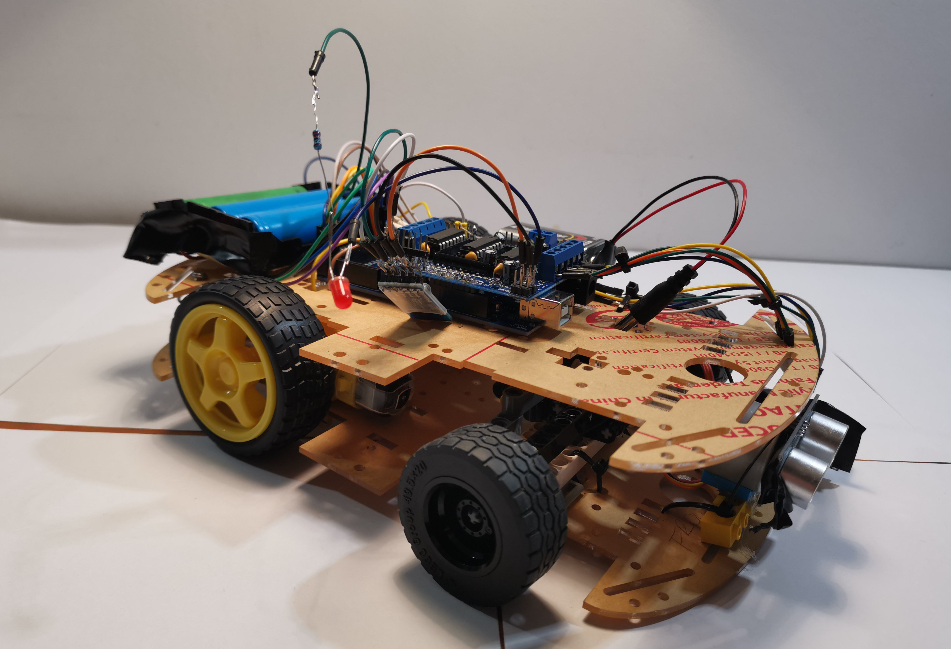
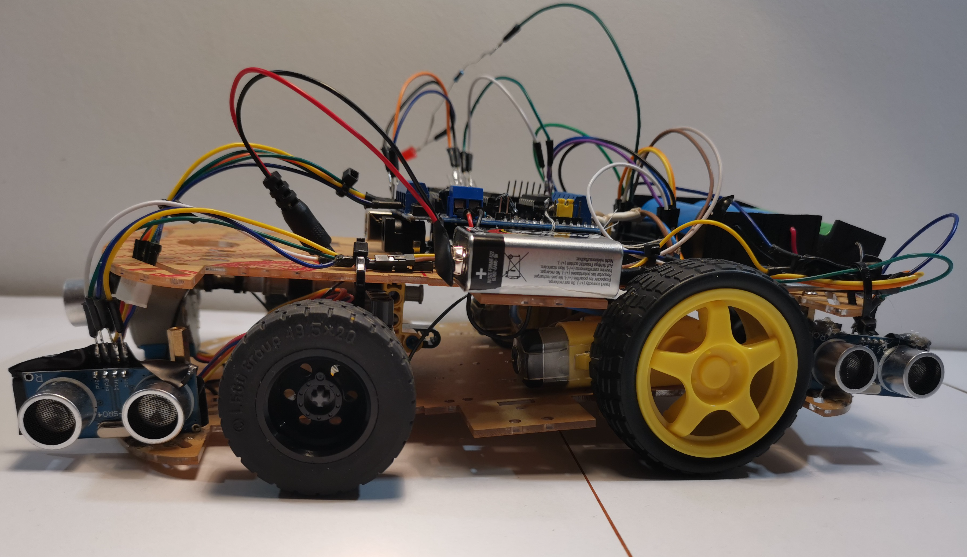
Arduino project: autonomous parking car turning with steering axle controlled via bluetooth.
The main goal of our project is to achieve a real-life, working model of a car that is able to detect parking spots and park independently in two different parking modes.
It is an autonomous car-manoeuvering system that moves a vehicle into a parking spot without human intervention. It allows a vehicle to perform parking maneuvers at different angles. It aims to enhance the comfort and safety of driving. The parking maneuver is achieved by coordinating steering angle and speed which takes into account the actual situation in the environment to ensure collision-free motion within the available space
 Lkolod
Lkolod
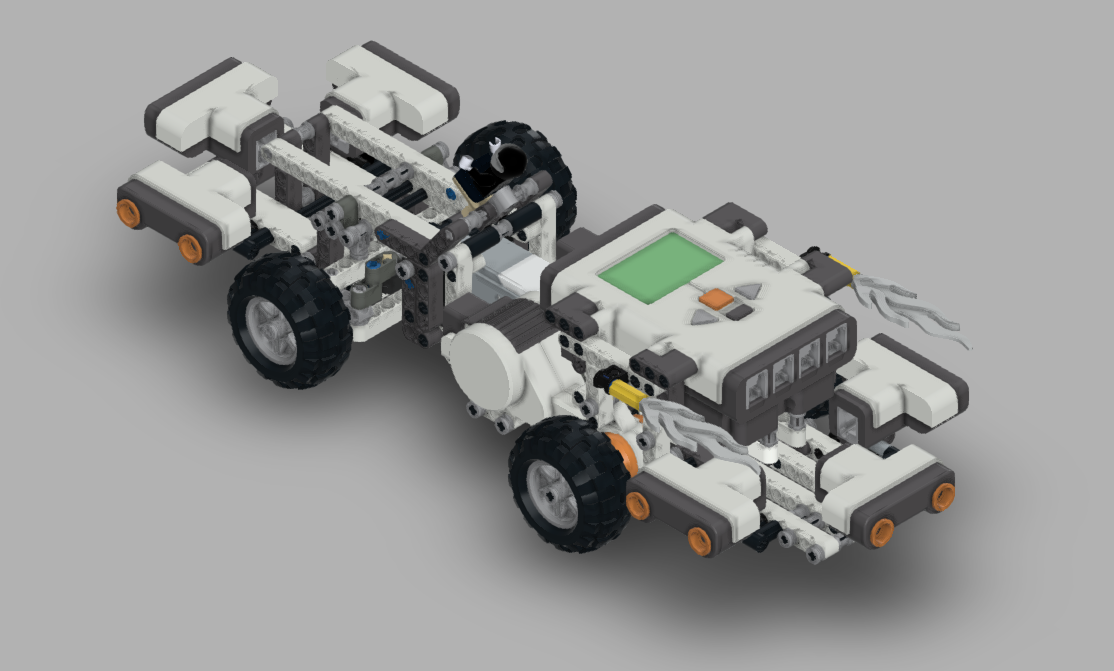
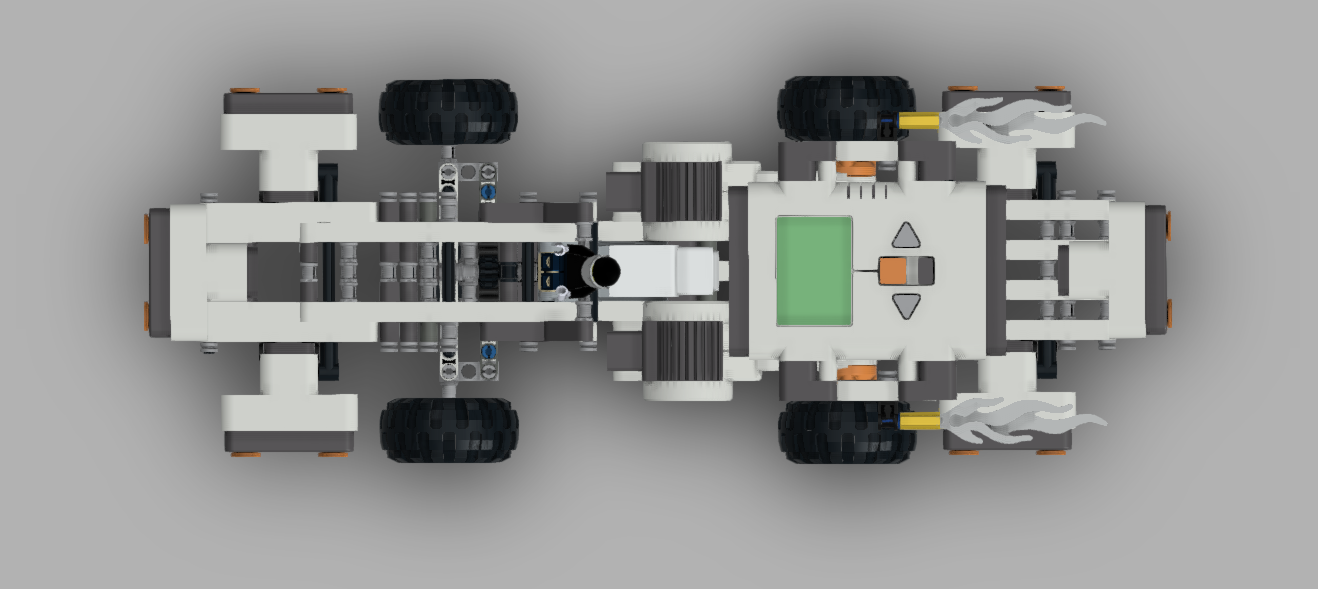
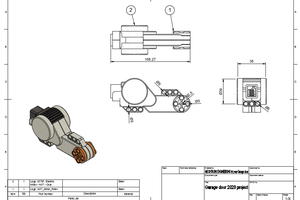
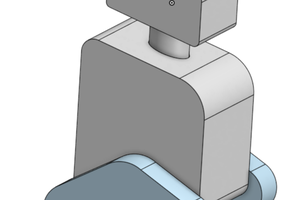
 CAD project pictures
CAD project pictures

 hashjhshsjs
hashjhshsjs