 John Opsahl
John Opsahl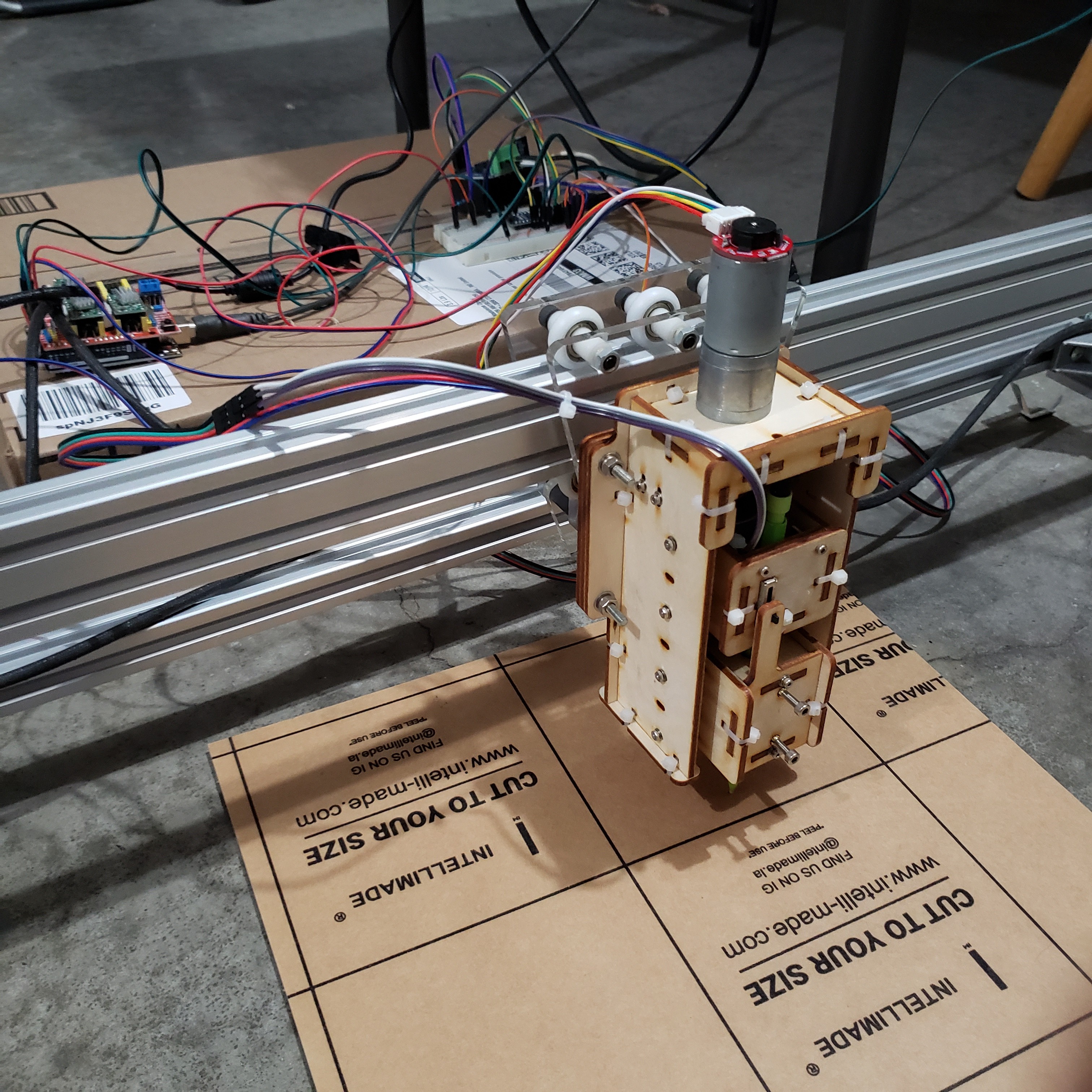
I recently updated the system to use a geared DC motor with an encoder for controlling the pencil movements. This approach is looking promising to solve the pencil position tracking issue and speed limitations I was having with the previous stepper motor design. On top of that, it has been incredibly fun to develop the PID controller for it.
During initial testing with the DC motor, I did not set travel limits properly. The pencil cart ended up breaking through some of the laser cut parts near the bottom of the assembly. After all new laser cut parts, a new linear carriage, and a couple nights of assembly and testing, the system is working great.
I still need to run a few performance tests, but it is looking good to be able to complete the next composition sometime in the next week.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.