 shane.snipe
shane.snipeThere is something very satisfying about spinning a board. How often do you get to eliminate a fumble with a few clicks of a mouse, 8 days and $50! All in the name of progress. Better yet, you get to implement all those lessons learned and cement the knowledge in your newer better revision.
Here was my punch list.
Schematic items.
4) Take a hard look at 5V and 3V. Anything running on 5V needs a level shifter to avoid frying the ESP with the communication signals. The two components that need to be 5V are the ultrasonic transducer and the DF Player. Move the Gyro to 3V.
- Added the level shifter for the Ultrasonic and the DF Player. Just used 2 6 pin headers instead of making the schematic symbol.
-Added the 5V to the board to board connector incase I want to run 5V on the other board without a battery.
- Changed the 5V to 3V for the MP6050. I think I had it at 5V because of the trouble the wimpy 3.3V ESP regulator was having but I do not think the lower power accelerometer will tip it over the edge. I have been considering adding a 3.3V regulator and not relying on the 5V to 3.3V regulator on the ESP to do anything. For this spin I am just going to move the accelerometer to 3V and put in the level shifter for the Ultrasonic and DF Player.
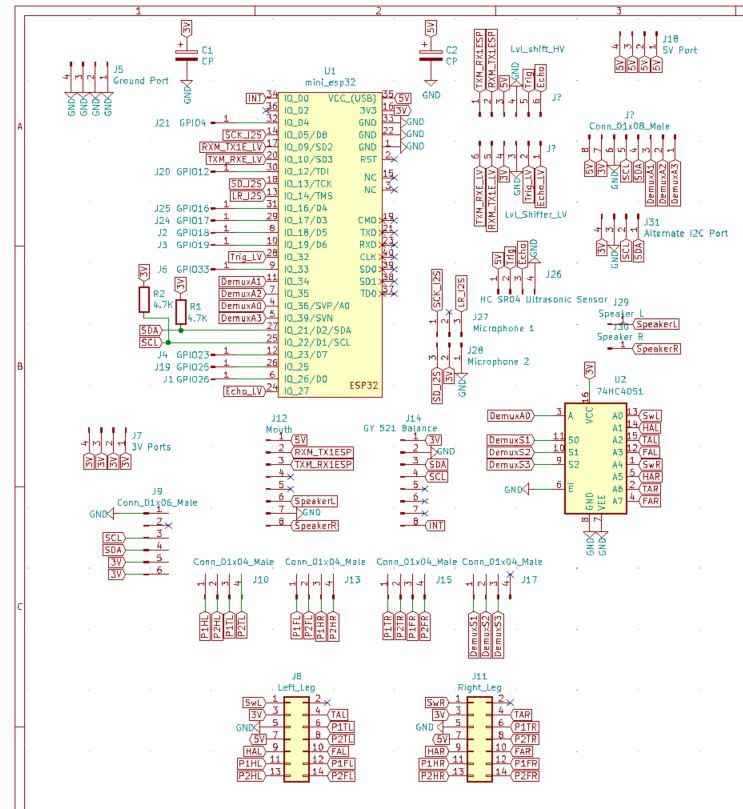
Here is the updated Schematic.
Now for the layout.
1) Changed the 7 pin connector to an 8 pin for the board to board.
2) Added the 2, 6 pin headers.
1) Move PCA9685 board up to avoid the interference with the leg connectors and potentially the motor.
Moved it up 8mm.
2) Narrow the pins on the Demux. Previously chose too wide a package and had to splay the pins to get it to work.
Forgot this one. Done now...
3) Use 2 ground planes and route discrete 5V power traces.
Worked fairly well.
6) Put in some through holes to allow the daughter board to be connected with some long standoffs.
Done.
Now label and ship.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.