 Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠We had upgraded our WIFI base station to a RUX11 , that was giving much better results. The robot still had 3x pi's on board, all connected via wifi and using the stock internal antennas.
The range of these antenna was actually quite surprising , but as data rates increased and the robot roamed farther from the wifi access point, we were seeing wifi drop outs and degraded data rates. Sometimes the raspberry pi's would refused to reconnect, this was resolved somewhat by given them static ip address assignments, rather them constantly asking for DHCP service on wifi reconnect.
Even with those optimisation, sometimes the network stack would just die, and not come back. Rebooting pi's becomes a chore, and not something you want to be doing on a production robot. The internal wifi cards on pi's are not designed for realtime robot communications!!!!!
We also need to get greater range, we played with a few external USB wifi cards, that had high gain antennas.
we tried
https://www.alfa.com.tw/products/awus1900?variant=36473966231624

it was kinda great? It was long range, had great performance.
I spent a little bit of time configuring the pi to become a wireless bridge and all seemed fine.
After testing however, on boot, sometimes the device would not be recognised, having to visit the robot, disconnect the usb and reconnect it was a bit of pain it the ass.
The drivers seemed to be pretty low quality, sometimes even core dumping the pi.
So a classic case of good hardware, poor software drivers that plagues many of these usb devices.
When pumping through low latency video, it would get hot, very hot, i think that's the thing that killed it in the end. This and the fact that the networking stack on rasbian is a bit of mess, and gets messier when you start adding extra usb wireless devices. To reduce complexity i completely disabled the pi on board wifi with rfkill and in the boot configuration file, after a few days ...the wifi device came back from the grave!!! causing a few scripts i'd hardcoded with interfaces address to start mysteriously failing!! arghh!!!
we decide to shelve this short lived USB wifi experiment and get serious.
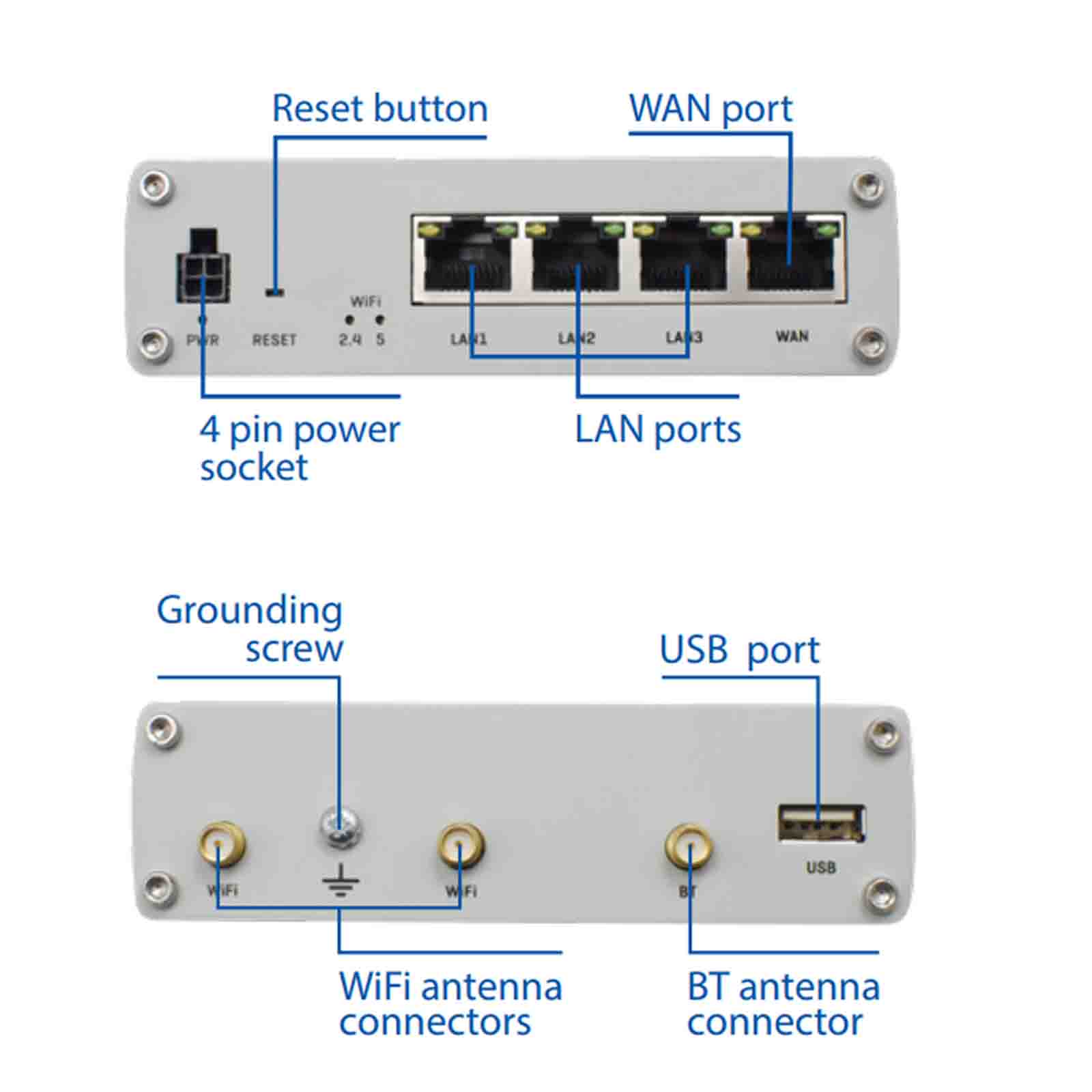
The solution was to add a dedicated RUTX10 router board to the robot, not only did this give us good stable wifi connectivity with the flexibility of openwrt, but able to add external high gain antenna's, and give us physical Ethernet ports too. As the pi's were now just using Ethernet to communicate and all wifi management was done by the RUTX10, the pi's were running cooler and using less power, less things connected to wifi too....i'd call that a win. Networking was starting to work reliably so we could get on with other things!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.