Xylobot is a powered mobile platform intended to meet the following informal design constraints:
- Able to move 20 to 30 kilograms in a controlled and stable manner
- Cost no more than about 200 US dollars
- Build without need of industrial equipment (power drill "Yes"; milling machine "No")
- Made from materials easily available without going to industrial suppliers
Given these constraints, Xylobot is not the technically 'best' mobile platform; rather, it is inexpensive and hackable. It is intended to be accessible to people without easy access to specialized equipment. It should be considered as a set of resources to be adapted as circumstances require, not as a fixed 'build it this way' design. The potential to modify and add functionality is limited only by the curiosity, perseverance and ingenuity of the experimenter.
Please note: The 'Zeroeth' constraint, before those listed above is my own (lack of) experience with mechanical design. I am simply documenting what I have tried in the hope that it may be interesting to others. I have no formal or professional qualifications in robotics or engineering. If you decide to build or operate any technology it is entirely at your own risk. I disclaim any liability.
Any trademarks, patents or other property are the property of their respective owners.
Hardware described herein that is my own design is licensed for use under the CERN open hardware license, version "CERN-OHL-S" https://cern-ohl.web.cern.ch/home
Software described herein that is my own design is licensed for use under the GPLv3 https://www.gnu.org/licenses/gpl-3.0.en.html

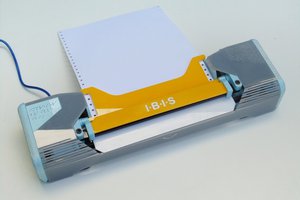
 IBIS - Impresora Braille para la Inclusión Social
IBIS - Impresora Braille para la Inclusión Social
 Brian Ferrara
Brian Ferrara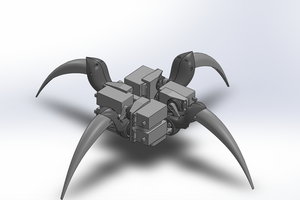
 TechSpiderbot
TechSpiderbot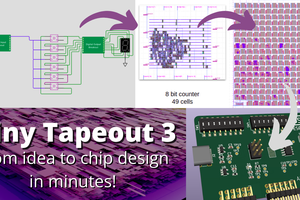
 matt venn
matt venn
Documentation being written. Hope to publish in a week or two... stay tuned!