I connected up three 3.7 V 1.0 Ah Batteries that had been charged up using the Solar Cells. These went via the battery charger circuit which steps the voltage from each cell to 4 V.
The sources were placed in Series so the voltage across all three comes up to 12 V.
Using this I connected the supply to a Stepper Motor Driver.
Connecting up the Stepper Motor to the Driver and used a Signal Generator to provide 5 V Pulse input.
When the sig gen was enabled Stepper motor rotated.
This proves that the idea of a Battery charged by Light can rotate a stepper motor.
I decided to see what the current draw would be for different frequencies.
Using a DVM set to the 10 A range I was able to get some measurements, unfortunately the resolution was at 10 mA. The next range was maxed out at 200 mA.
Also this curve has large number of data points missing so the 'curve' is not to be taken to heart and just an indication.
I guessed the error bars to be +/- 10 mA.
The Stepper Motor had no 'Load' but when trying to hold the shaft I could see the current increase.
Here is the graph.
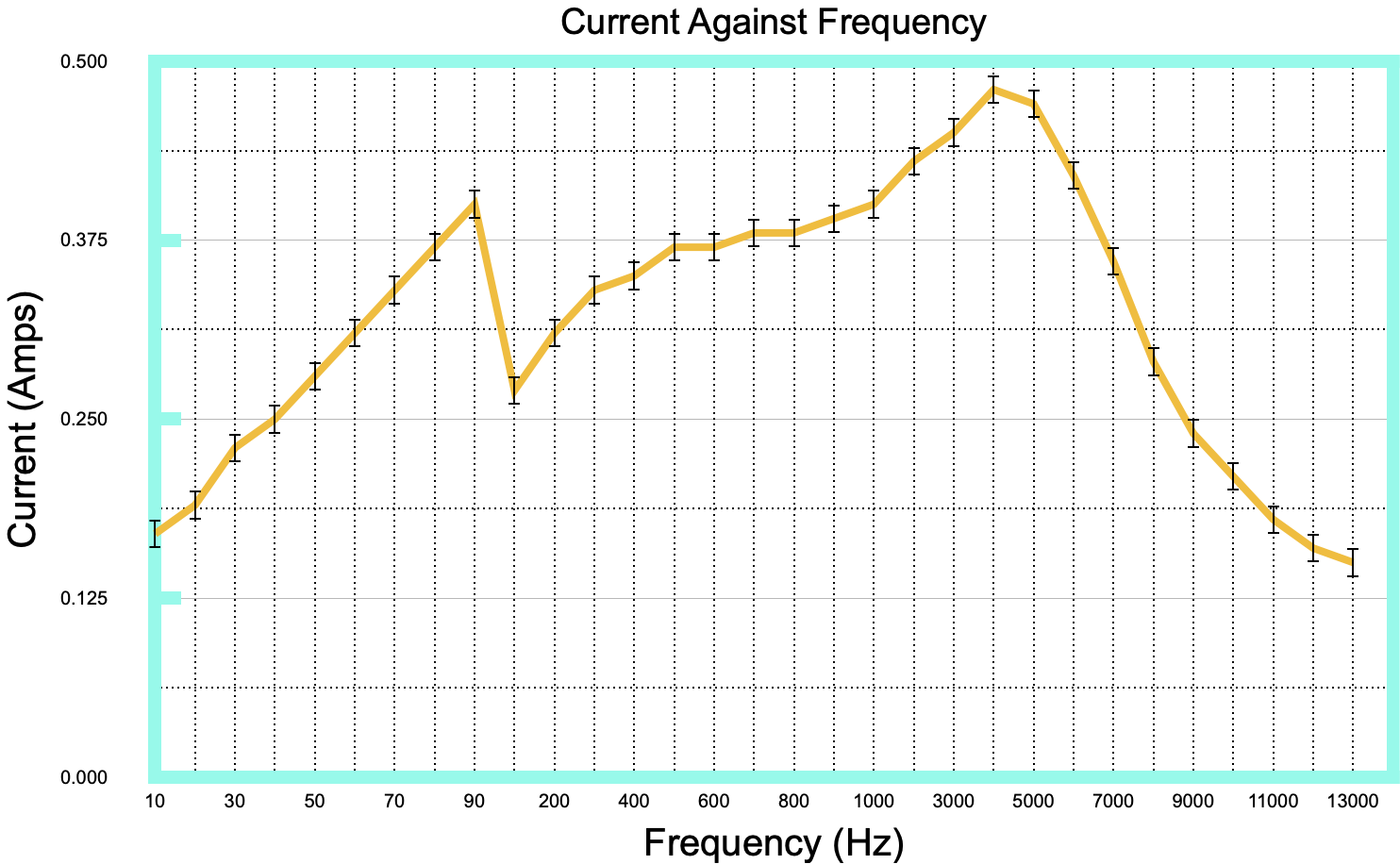
The peak current about 480 mA. To make estimations easier let's assume the current draw is 500 mA.
Assuming that 1.0 Ah batteries and there are three of them this gives a total current capability of 3.0 Ah.
At 500 mA this give six hours of operation at Maximum current for one motor.
Note this is at 4 kHz so reasonably fast.
It will be of interest that to see what happens with two stepper motors. In theory half of the current will be available for each motor so half the torque. This is because Current I understand is related to Torque.
This could steer the design towards having only two motors. However this removes the ability to turn on the spot and thus aim. Pros and cons.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.