 kelvinA
kelvinA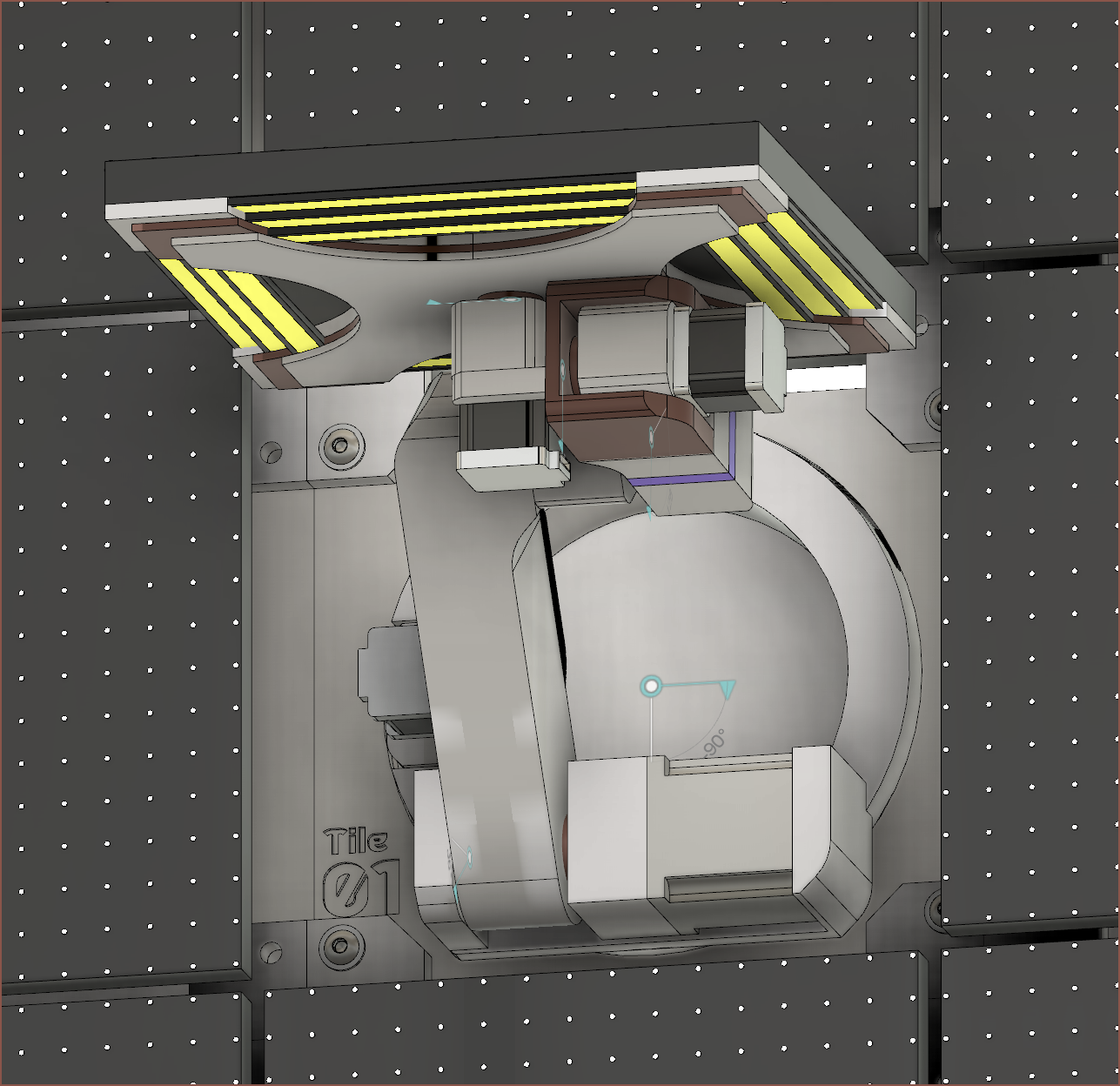
This is the concept model of one of the tiles. The frame is 4040 alu extru and the motors are all Nema 14 except for the N23. The front tile is a 256x256mm LED matrix and the back is an array of COB leds for backlighting effects.
One of the main positions I wanted was for the tile to be planar with the ground, so something like Fluidum wasn't going to work. I also want these tiles to be quiet as I intend to have them running in the background, so hobbyist servos were also not an option. I've already bought 200 Nema 14 motors.
3 Axis
Originally, I only wanted to go with a 3 axis tile, but the concept turned out to be too large and likely too wobly to work (not like an arm configuration is any stiffer)
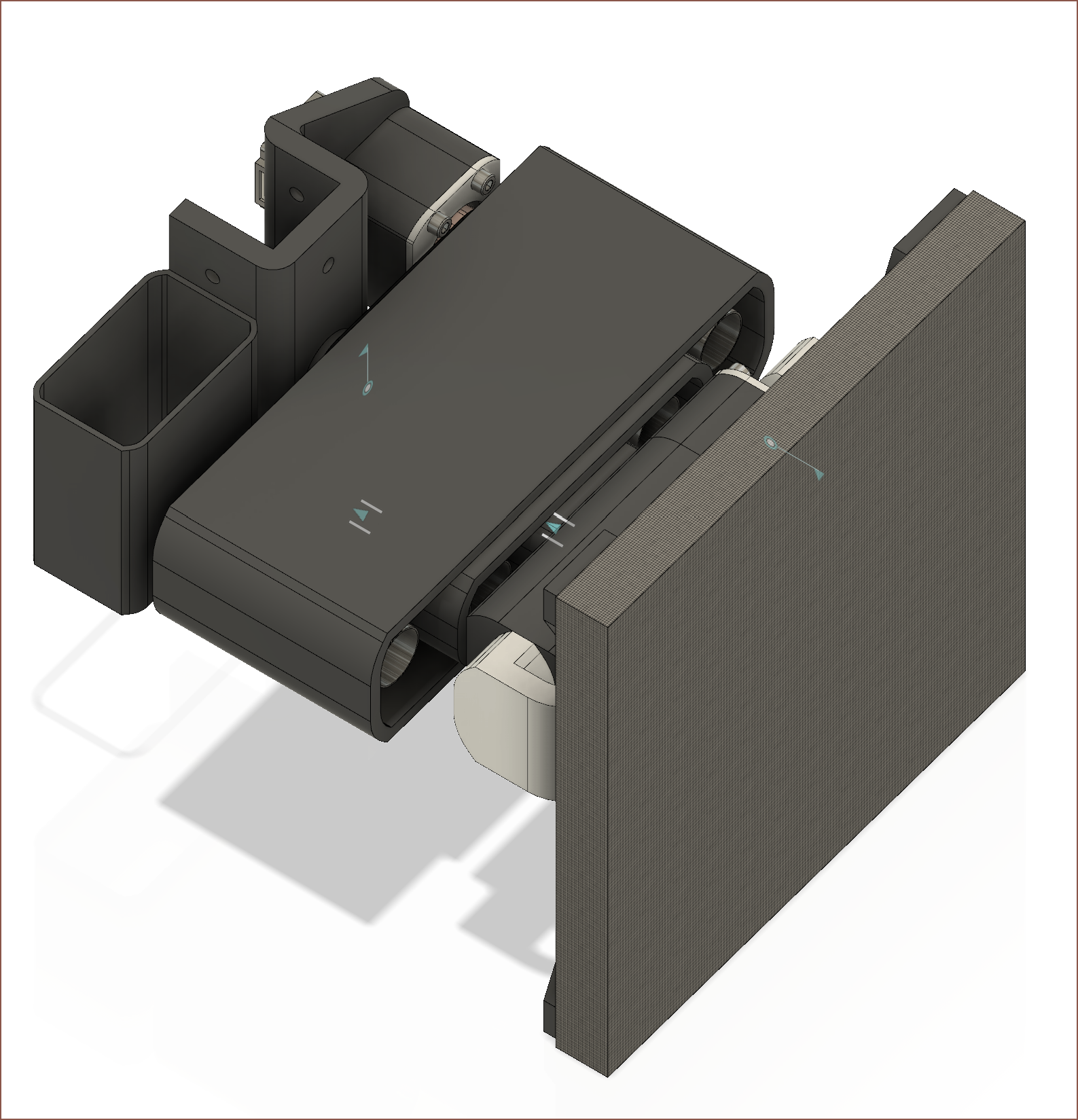 Perhaps I could revisit this idea, as less motors means less motor drivers and less power consumption, meaning more tiles for a given power socket. It also makes animations faster to make. The 7x7 wall installation would theoretically take up more power than the 3kW from the socket, so I started looking into battery storage solutions so that there was a store of energy in times when the tiles took up more than what was available from the mains. I also wanted to cover the tile in a fabric like material so that it just looked like a nice looking wall when it wasn't doing anything.
Perhaps I could revisit this idea, as less motors means less motor drivers and less power consumption, meaning more tiles for a given power socket. It also makes animations faster to make. The 7x7 wall installation would theoretically take up more power than the 3kW from the socket, so I started looking into battery storage solutions so that there was a store of energy in times when the tiles took up more than what was available from the mains. I also wanted to cover the tile in a fabric like material so that it just looked like a nice looking wall when it wasn't doing anything.Reducers
For the motors, I've opted for a harmonic drive that I currently haven't tested. It's currently a 17:1.
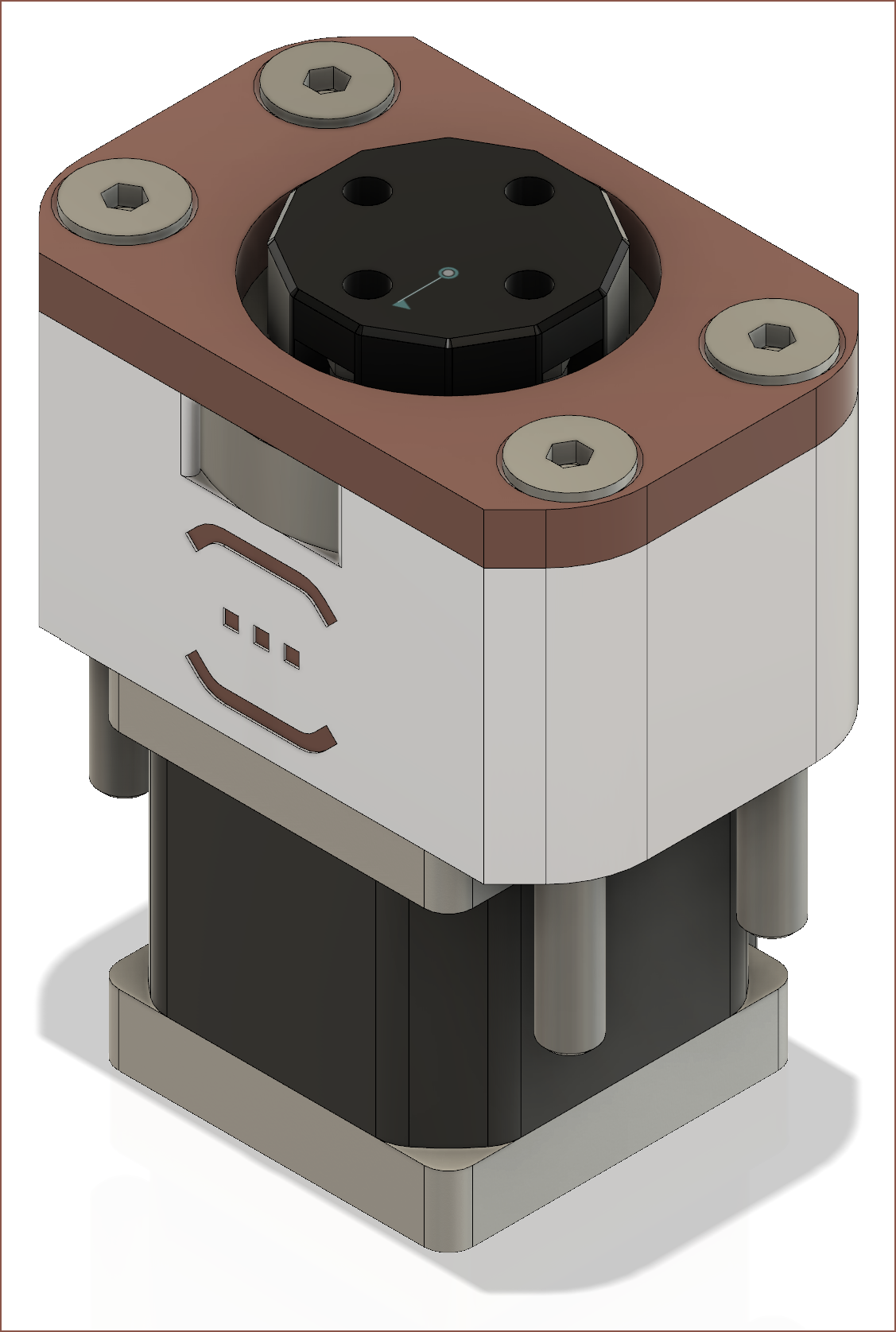 It uses a TPU belt-like print for the gearing.
It uses a TPU belt-like print for the gearing. 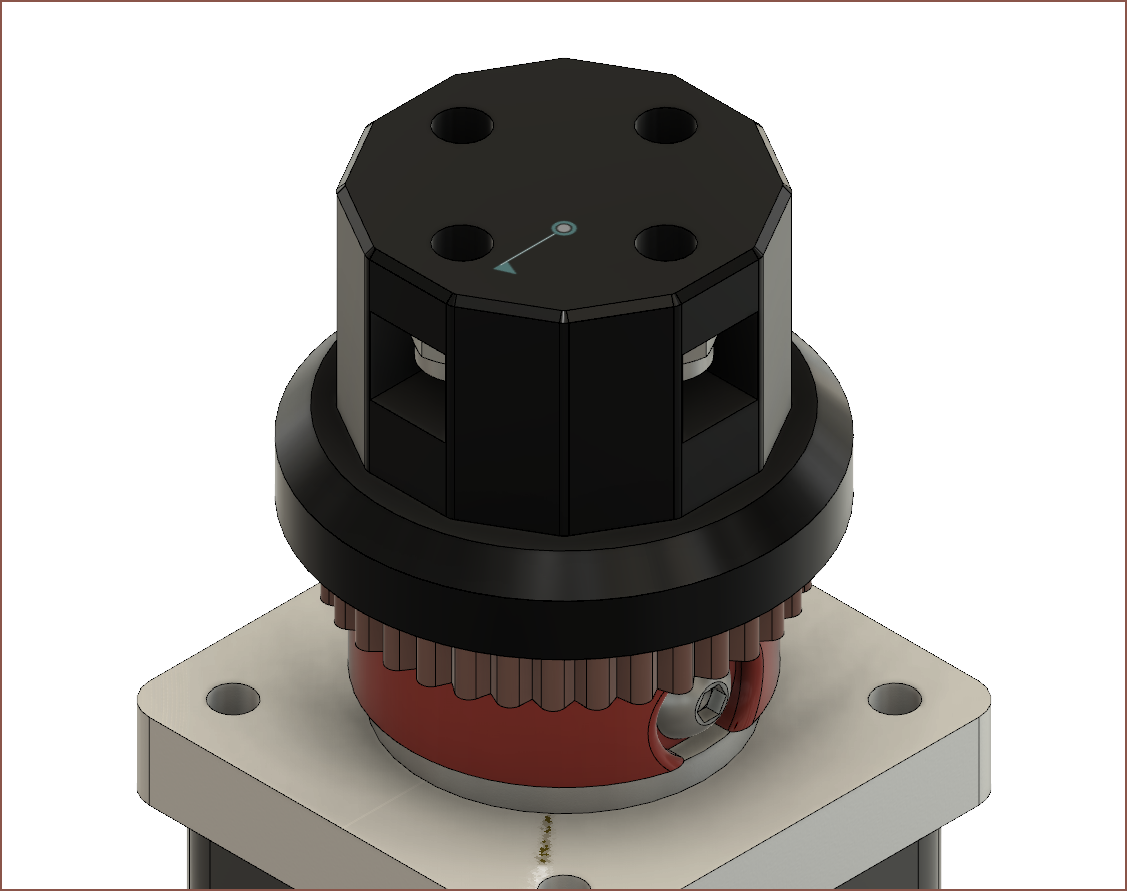
Looking at results from other peoples designs, I'm thinking of going from a dual bearing to a triple bearing to increase the amount of teeth engaged.
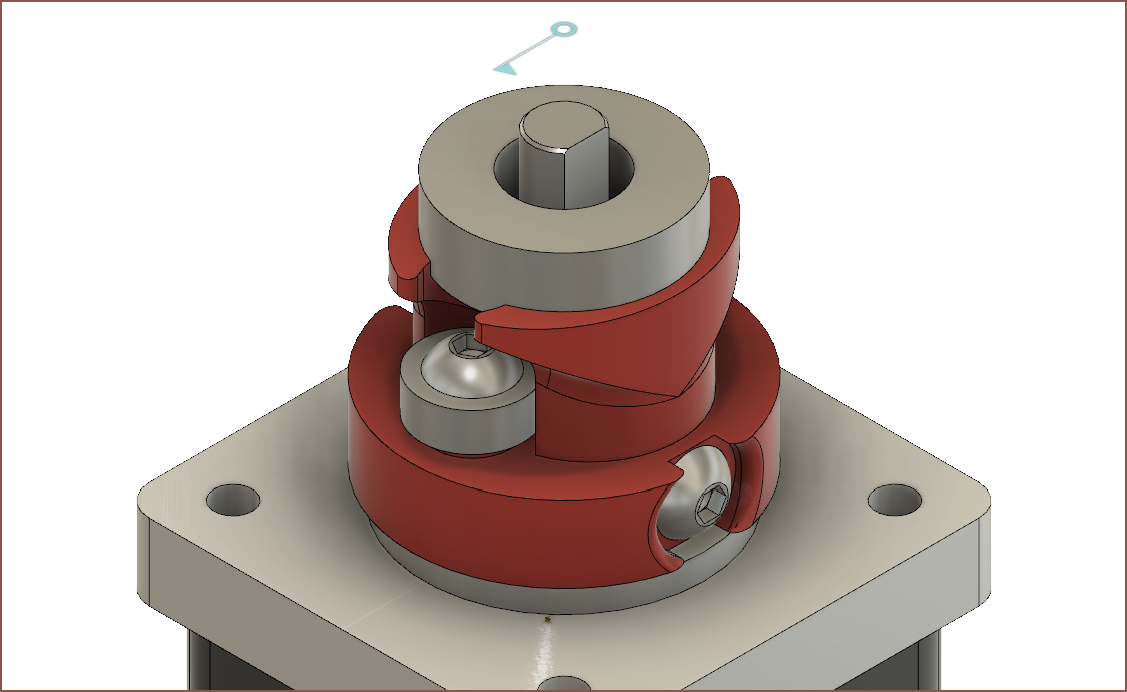
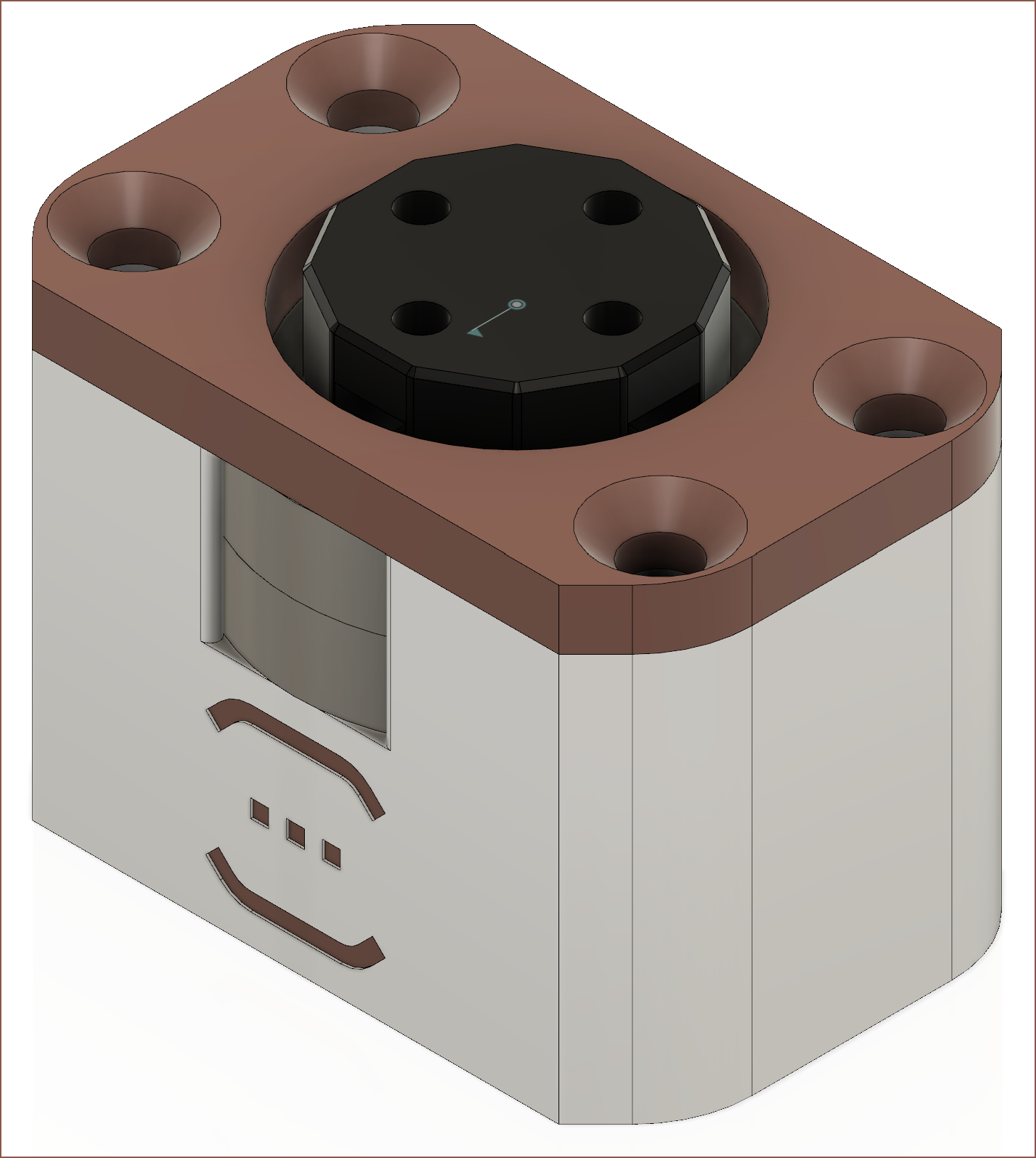 This reducer is for axes that have the space for it, so that the overal arm is stiffer.
This reducer is for axes that have the space for it, so that the overal arm is stiffer.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.