0%
0%
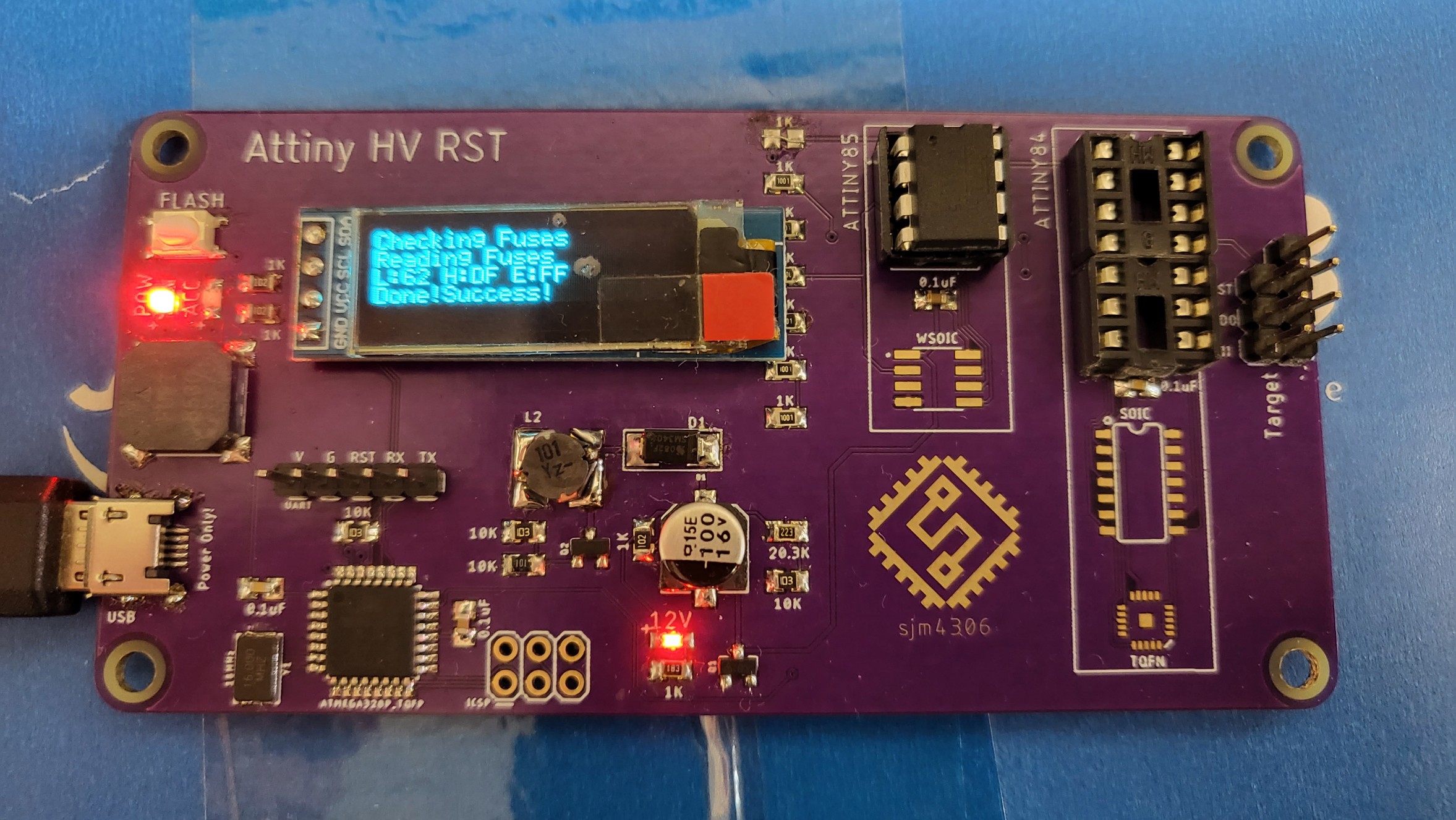
Attiny High Voltage Fuse Reset-er
I've started playing around with the Attiny series of chips but want a way to recover them in case of bad fuse settings
 sjm4306
sjm4306Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Jonathan Bruneau
Jonathan Bruneau
 Karl S
Karl S

 jaromir.sukuba
jaromir.sukuba
I approached the same issues. Not sure if the links on my project would be helpful to you or someone else but might as well make it available to folks. https://hackaday.io/project/178484-attiny85-sheild