 Pavel Surynek
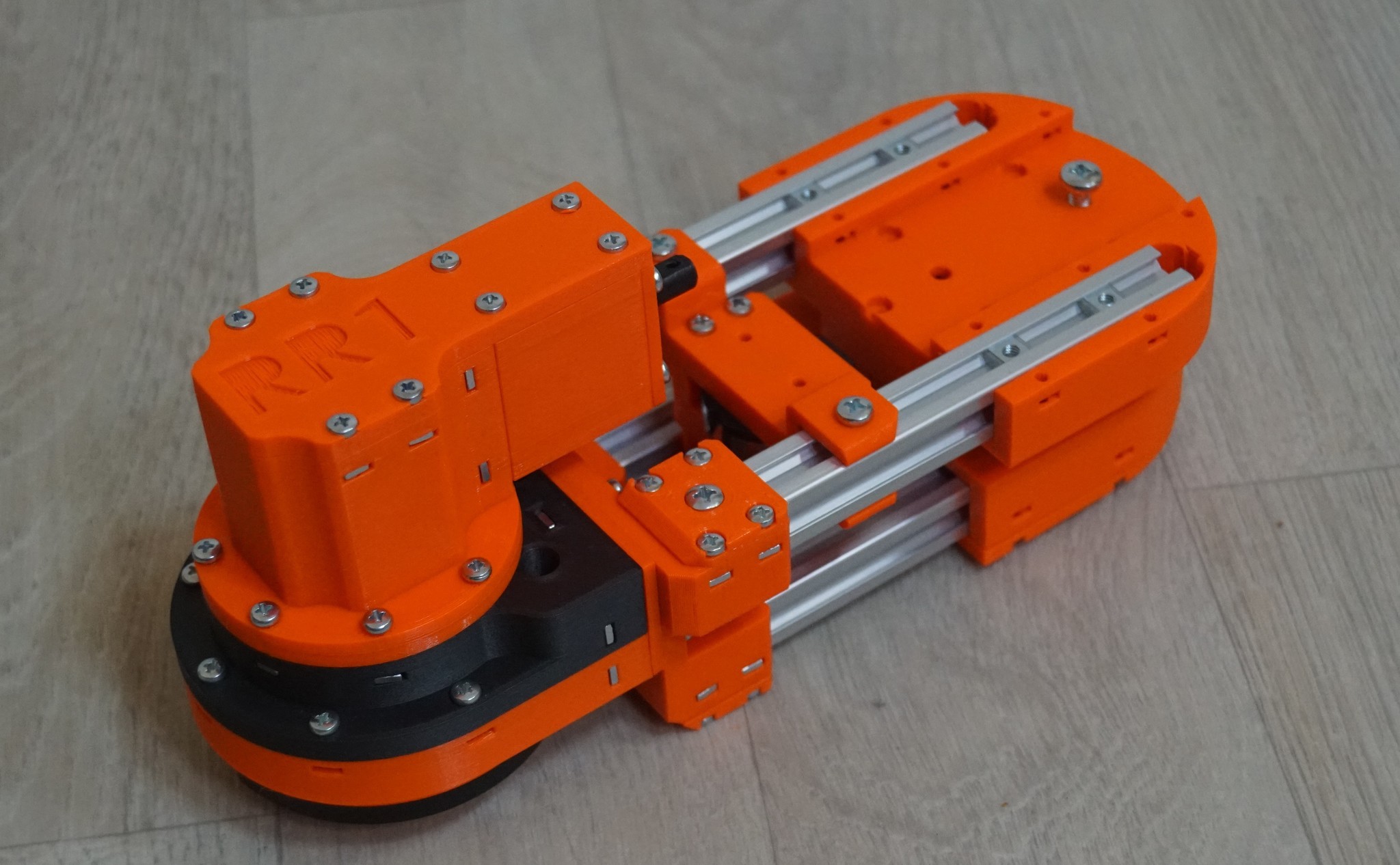
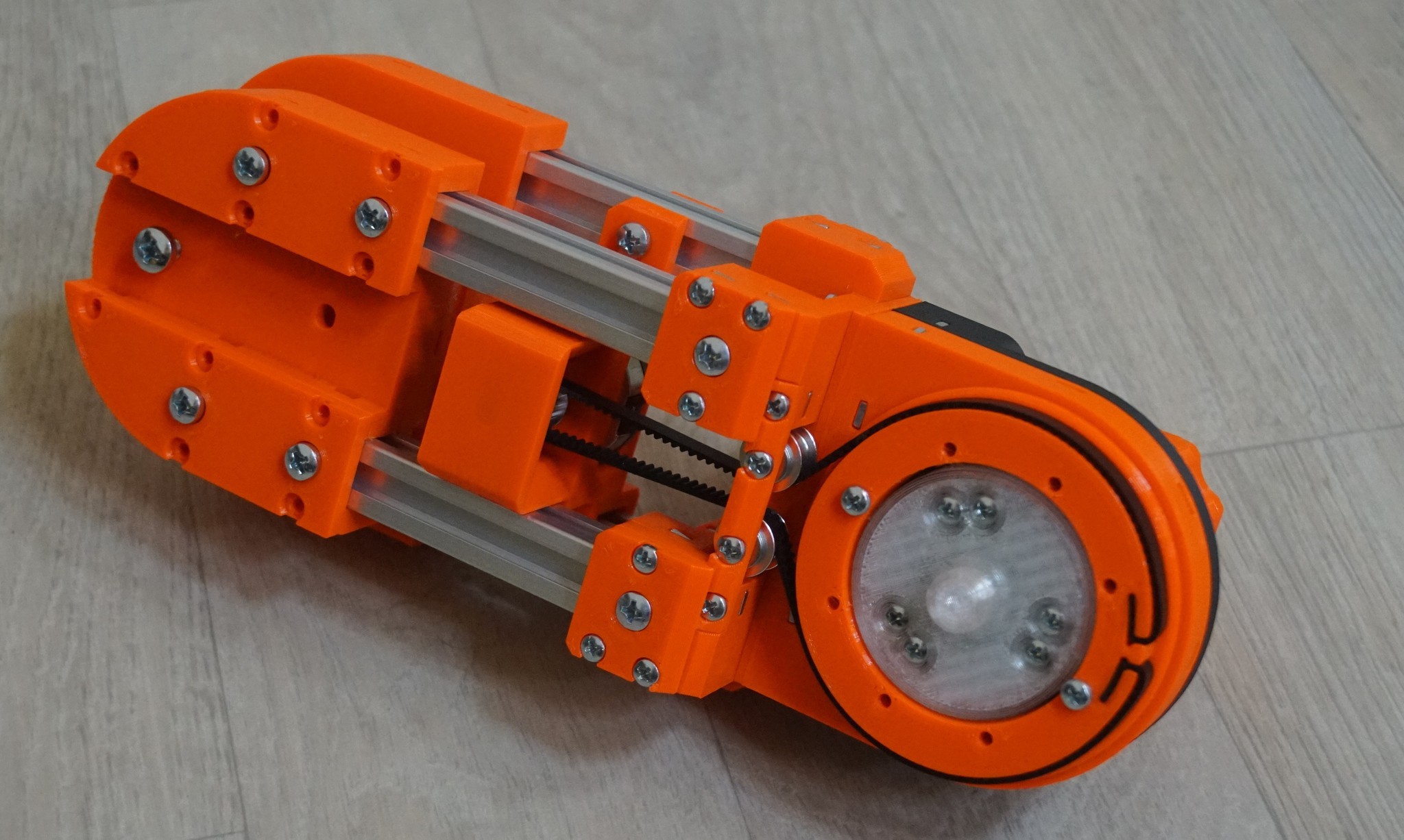
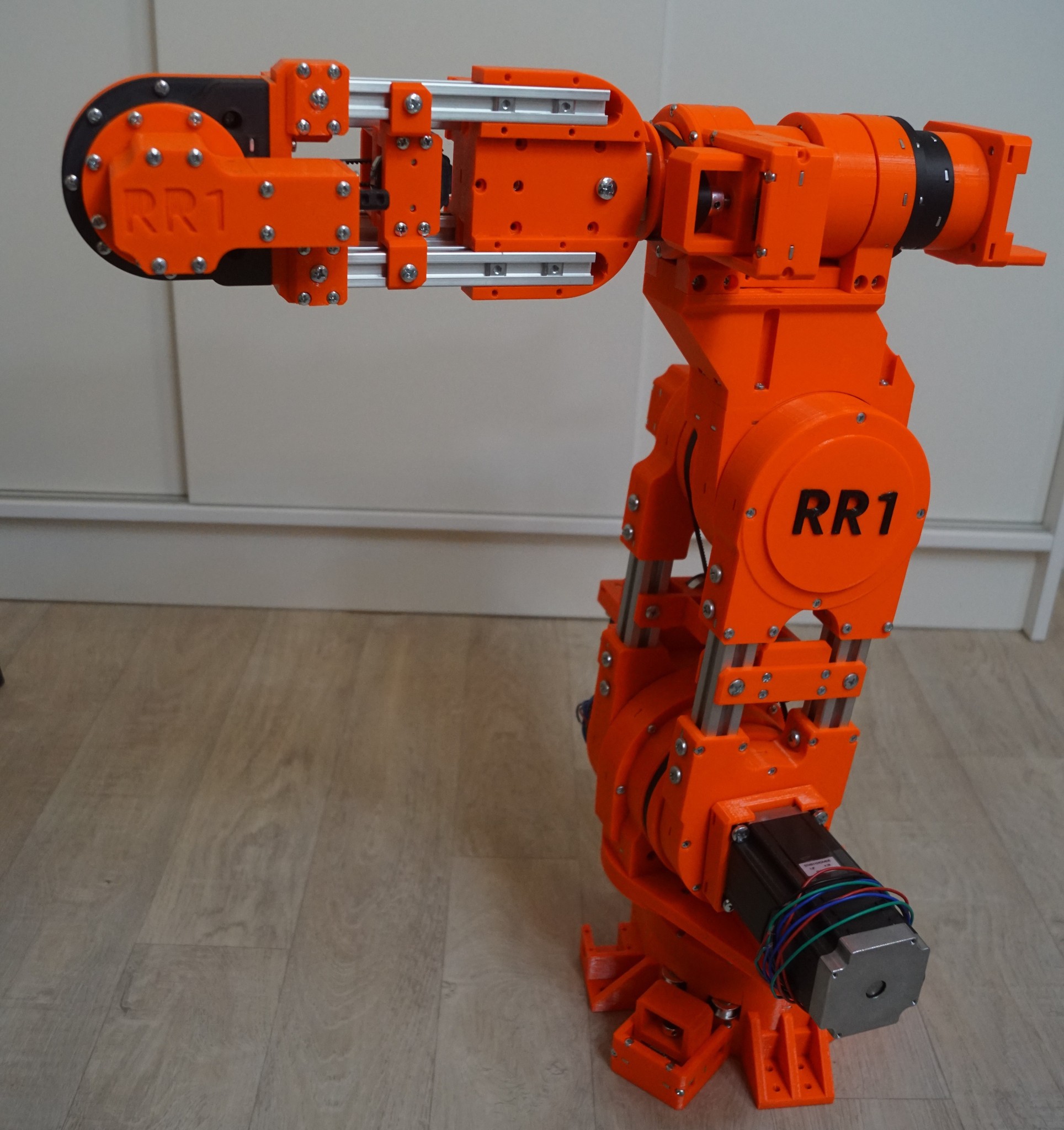
Pavel SurynekI have some good progress on the rev.2. The elbow link is finished and mounted on the rest of the arm. The following figures show what does it look like. The elbow link is shown separately, the rest of
the arm separately (in a folded position), and finally the elbow link and the rest fixed together.
The encoder nicely fits between the aluminum extrusions on the elbow. Parts of the wrist joint are again made of PC blend with carbon fiber (the black parts) - all the gears and rings in the gearbox. The reduction ratio for the wrist joint is approximately 1:10. Much less than in rev.1 which I believe can make the robot faster without compromising its strength. Another notable improvement from rev. 1 visible in the folded position is that the elbow link can rotate freely without touching the upper-arm link.
Now it is time for finishing the base turret and the wrist link with the gripper. Some important design changes will come on the wrist link as well.
 |
 |
 |
 |
 |
 |
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.