 mircemk
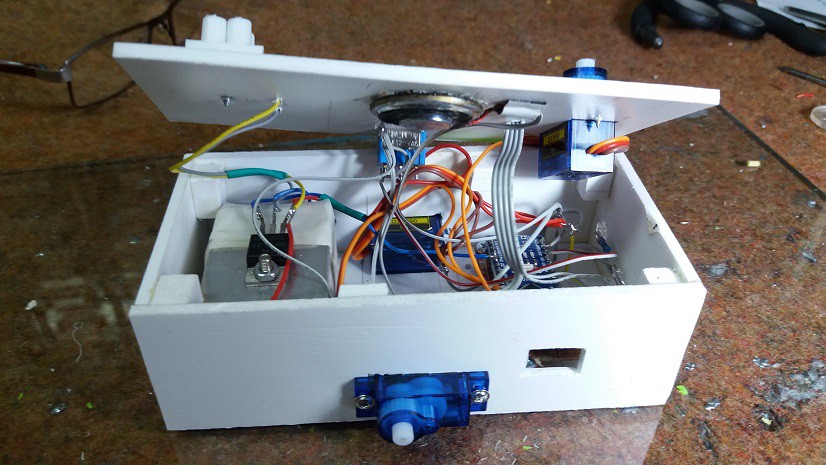
mircemkHome made robot partially 3D printed. .It is based on arduino nano board, servos, ultrasonic sensor and LDR resistors.
It has 4 modes:
- Manual control by IR remote ( forward, backward, right and left)
- Autonomous mode ( ArduBot navigates to avoiding obstacles and choosing the best way.)
- Monitor mode ( ArduBot is monitorng objects in front of the ultrasonic sensor. )
- Line tracking mode (I added this mode to the original design )
The left and right servo motors need to be modified for continuous rotation. You can find instructions for this modification in several places, and I used Adafruit's tutorial:
https://learn.adafruit.com/modifying-servos-for-continuous-rotation
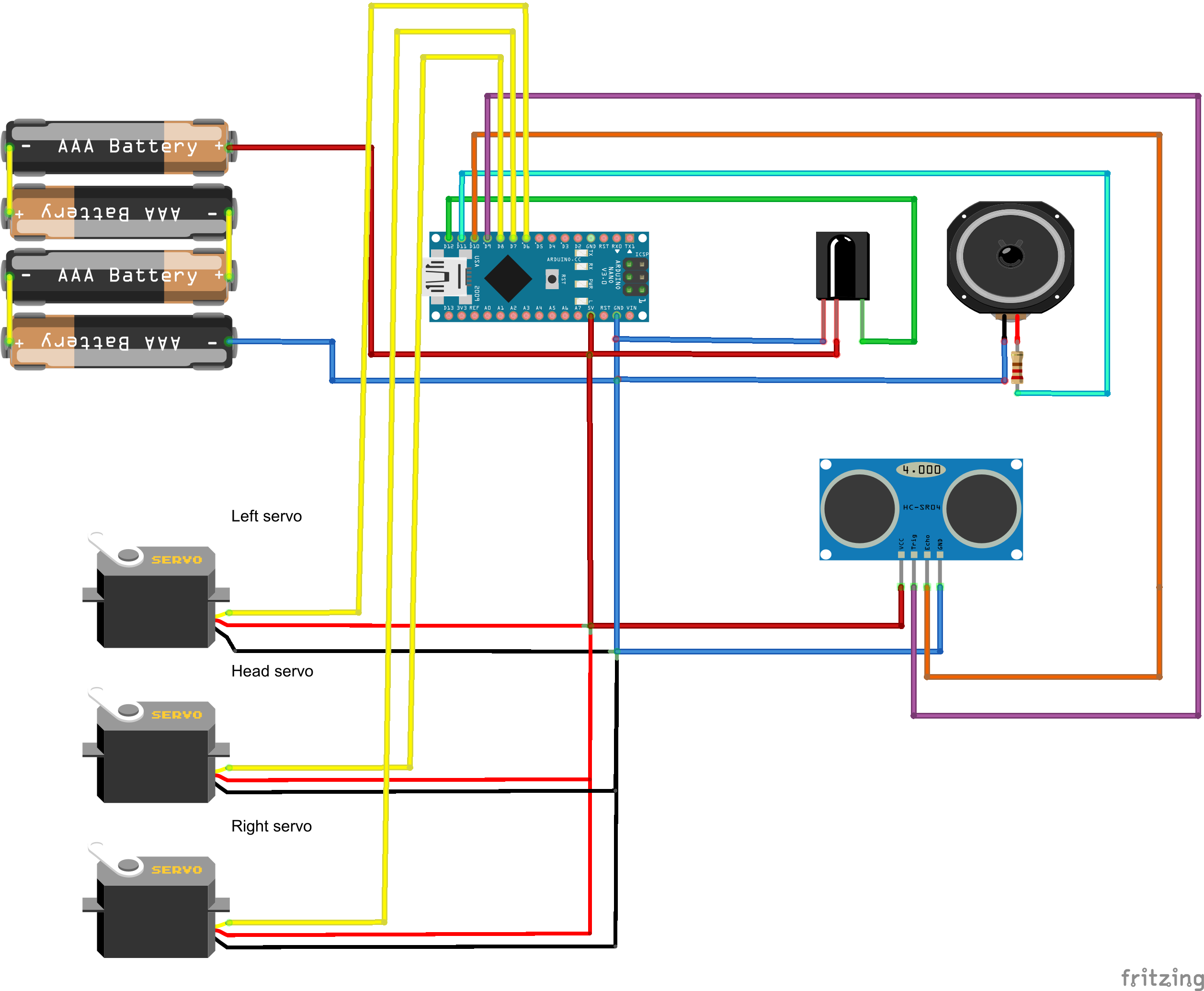
Schematic diagram:

 Roger Rabbit
Roger Rabbit

 Arcadia Labs
Arcadia Labs
 Ahmed Azouz
Ahmed Azouz
Hello i have a question about ardubot.
what kind of ir distance do you use here for but the code of my own doesn't work the arduino program doesn't accept.
Kind Regards Bill