 Mx. Jack Nelson
Mx. Jack NelsonHaving learned as much as we have about TJs board, we now know that he has a FAN8100N motor driver. Using 3.3 volts of power, obtained from the board, we are able to run each of TJs motors independently. In this video example TJ is on using battery power, but sleeping, and we use a jumper cable to connect to 3.3v power and each of his pins to run the motors.

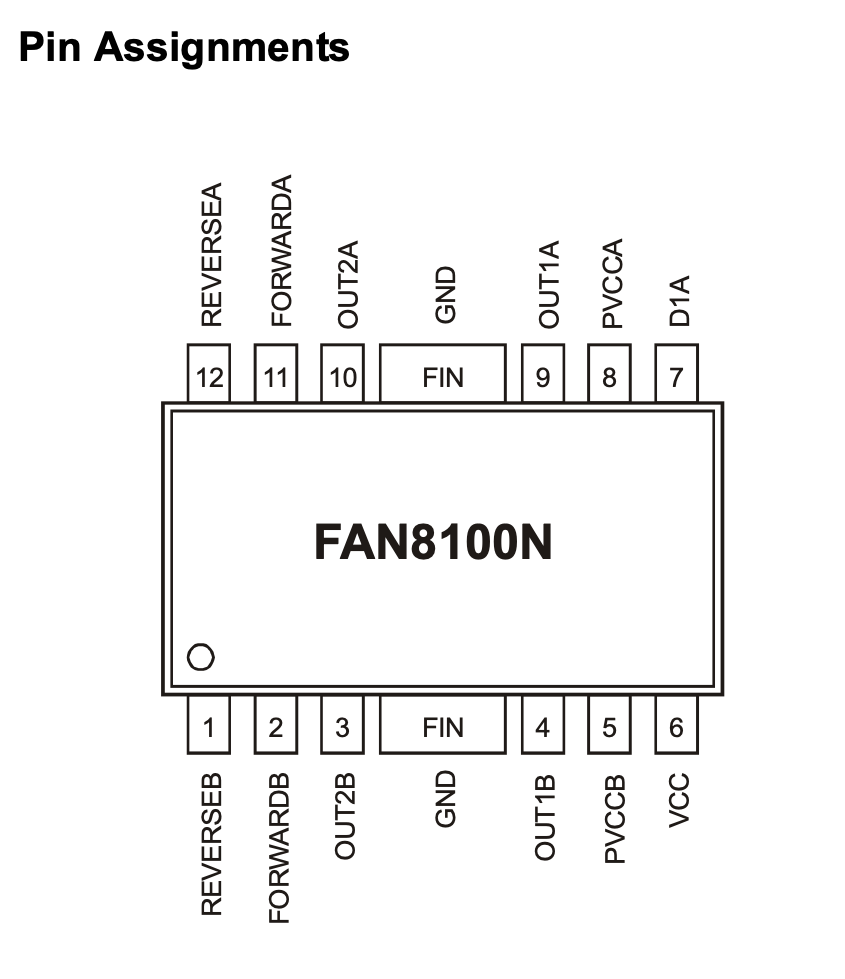
From the data sheet we have the pinout for the chip, which shows pins 12 and 11 are ReverseA and ForwardA. Pins 1 and 2 are ReverseB and ForwardB. These are the pins we will provide 3.3v power to in order to run the motors for the arms and the head. The eyes, ears, and mouth are controlled by an H bridge on the front of the board, and are easily accessed on the back of the board.
 Here on the board you can see the location of the motor driver.
Here on the board you can see the location of the motor driver. And in this image you can see the location of the H bridge resistors on the opposite side of the board, and the back of TJs buttons, where you can get 3.3v power.
And in this image you can see the location of the H bridge resistors on the opposite side of the board, and the back of TJs buttons, where you can get 3.3v power. 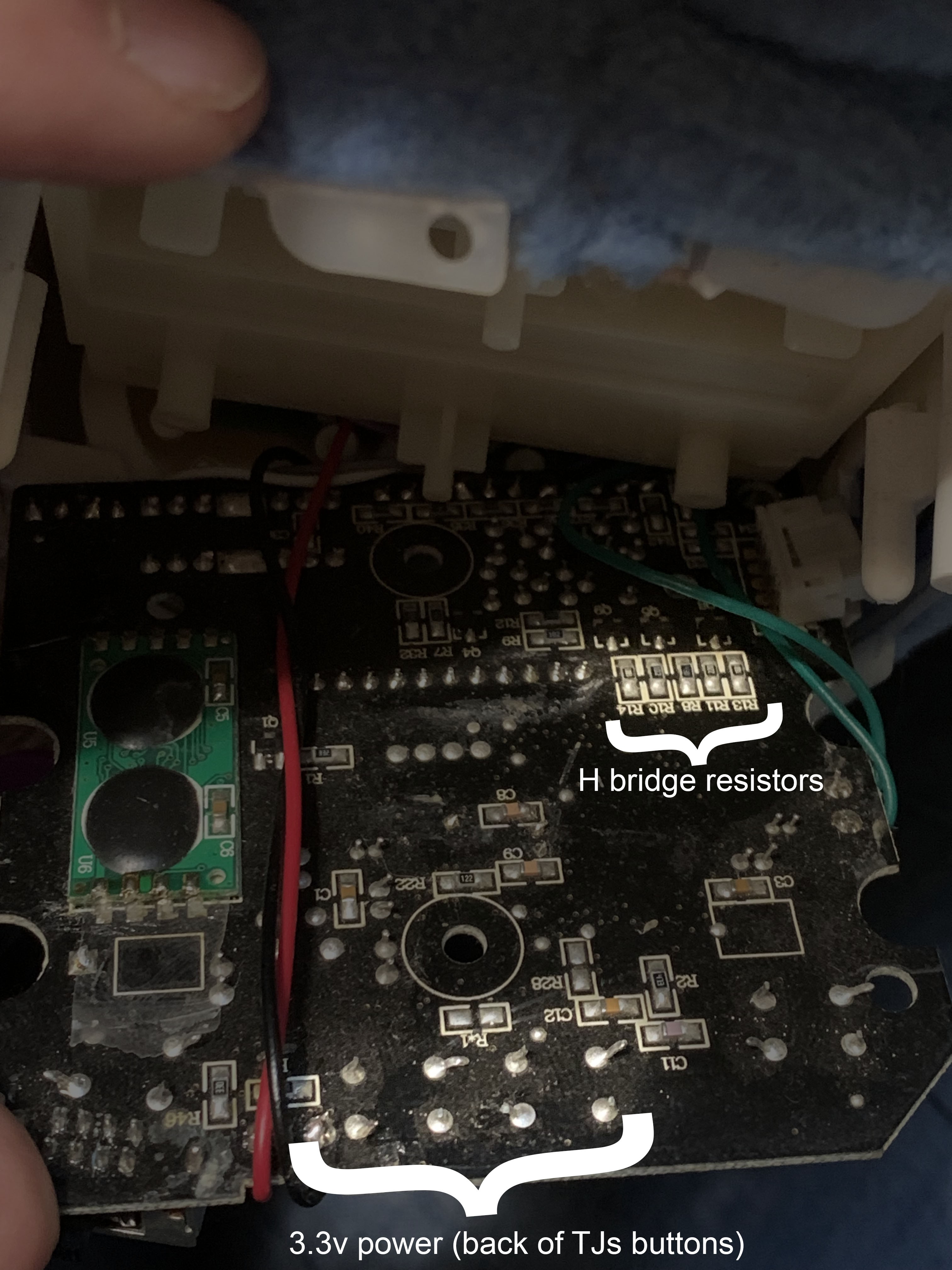
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.